Explore the technology of self-driving vehicles, robotics, linux, … and more.
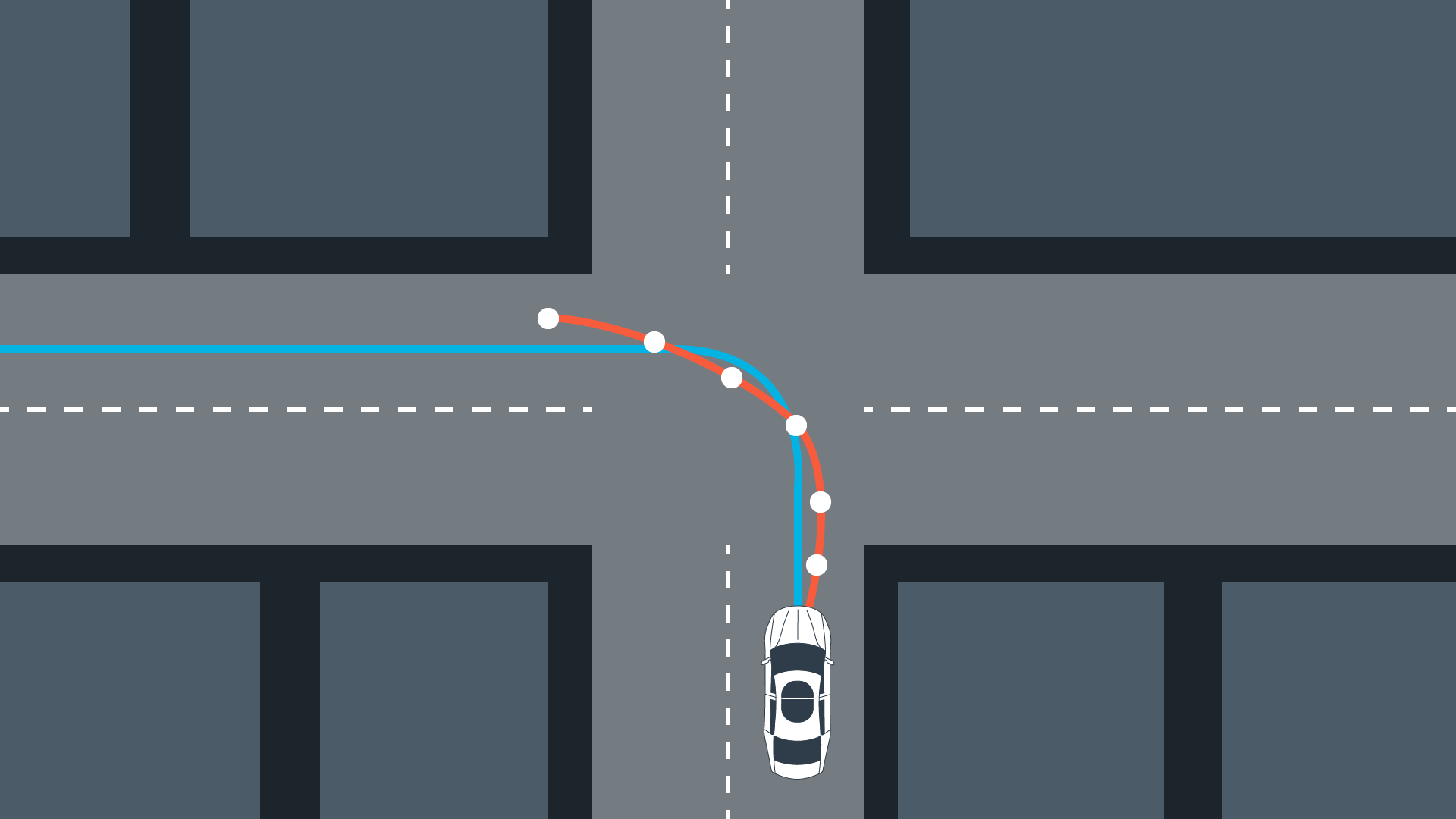
Trajectory Following
Where should your robot move in the next few seconds? This important question and even more can be solved by following trajectories
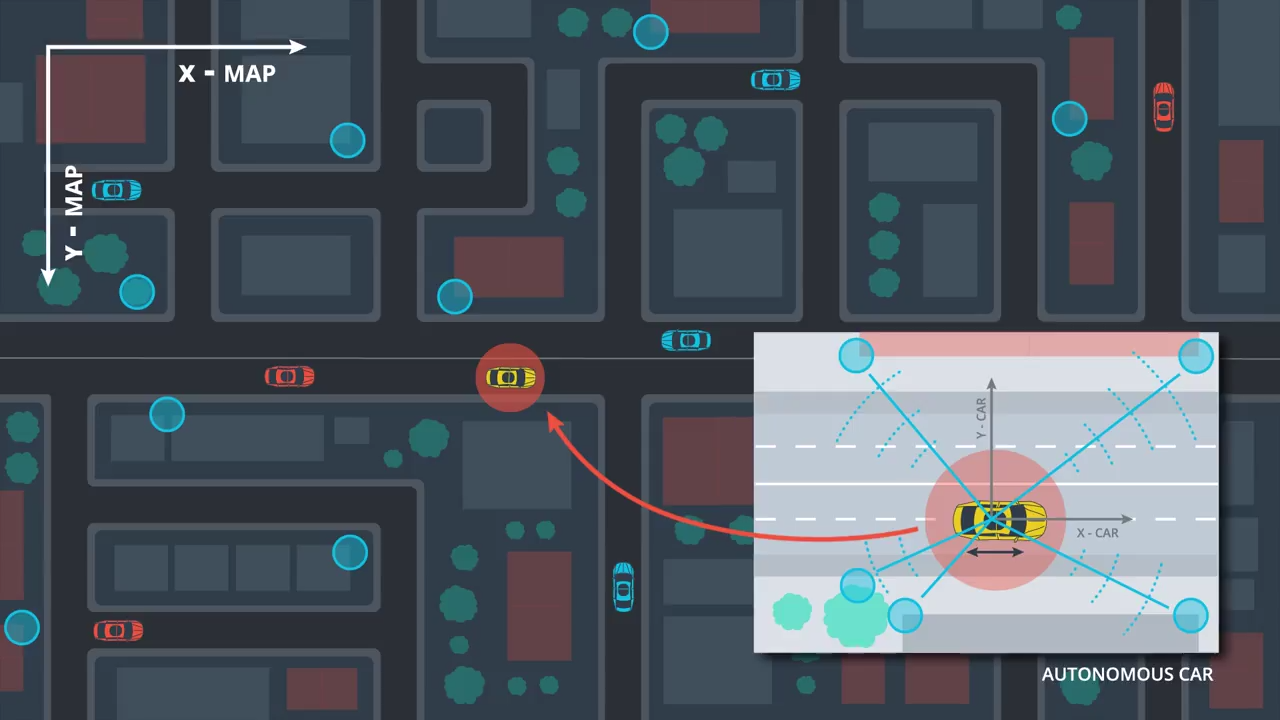
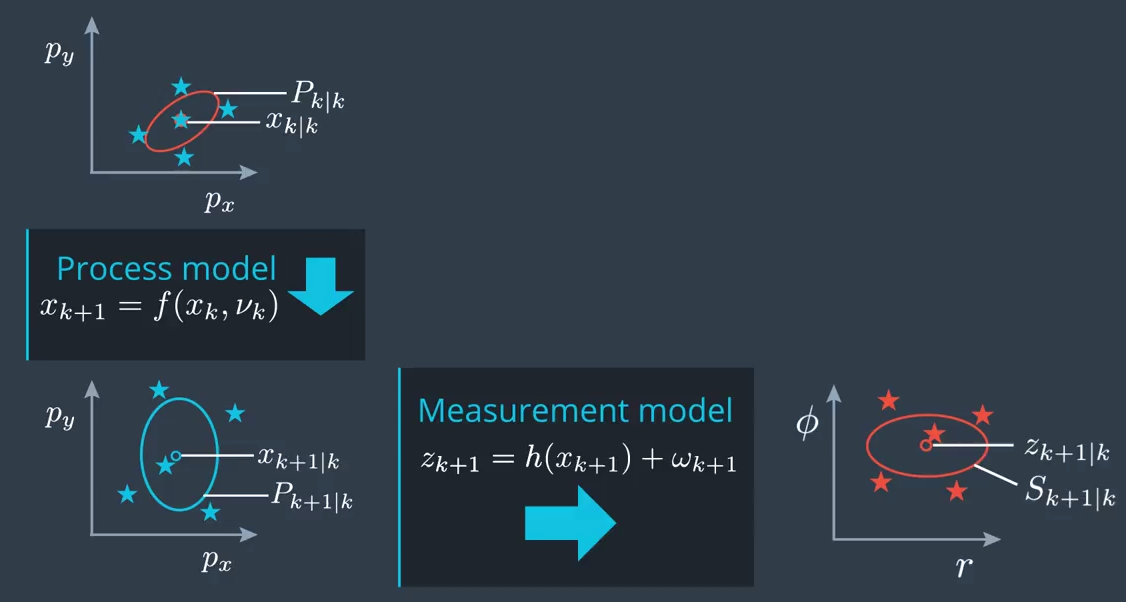
Localization
Localization is the key for a robot to navigate in a world. Learn here some localization techniques.
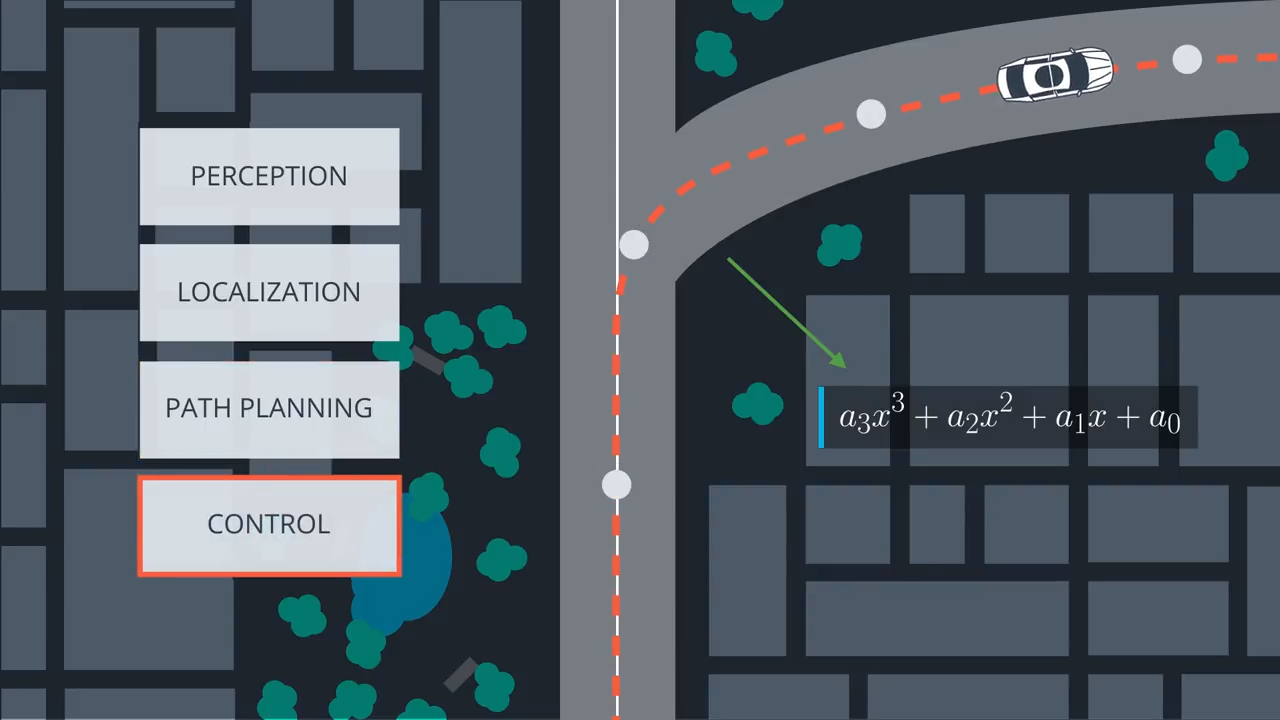
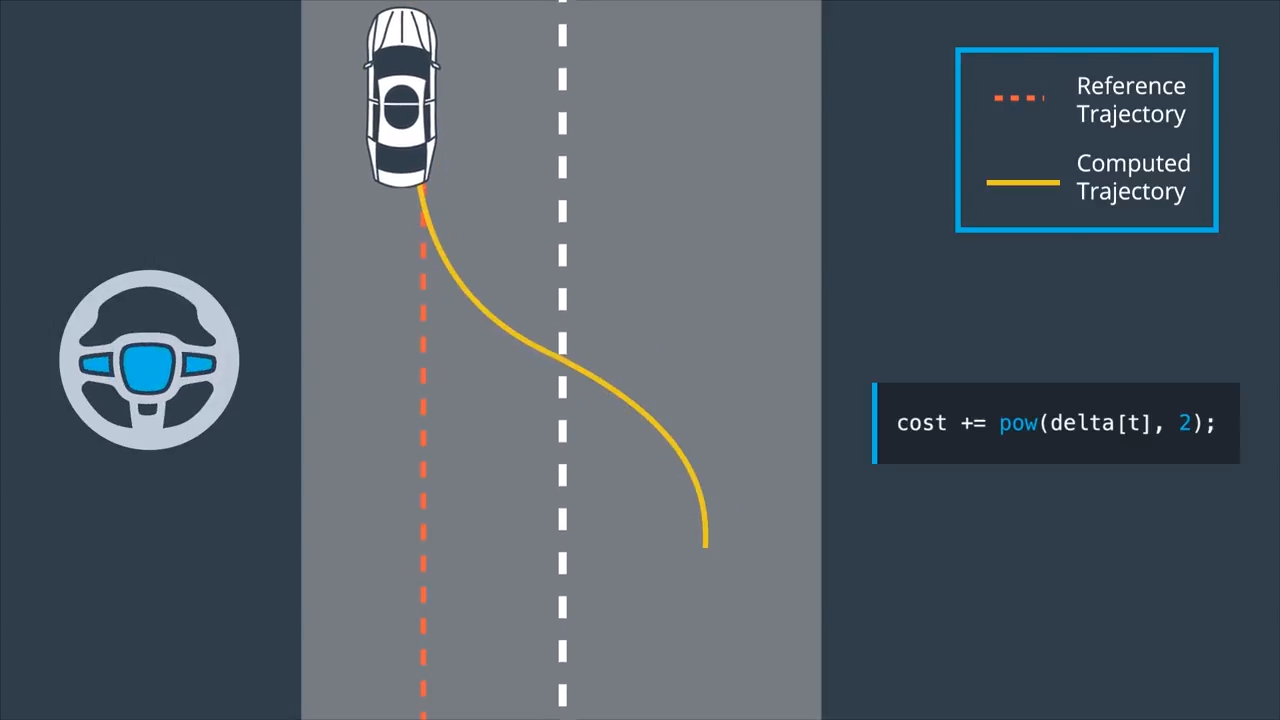
Model Predictive Control
Optimal control is achieved with Model Predictive Control. Find out how it works and learn about its strengths and weaknesses.
Path Planning
What is your overall goal? Not only you should ask yourself this question sometimes. A robot requires an answer to this important question too, in order to know where it is going. To help him, read about Path Planning first.
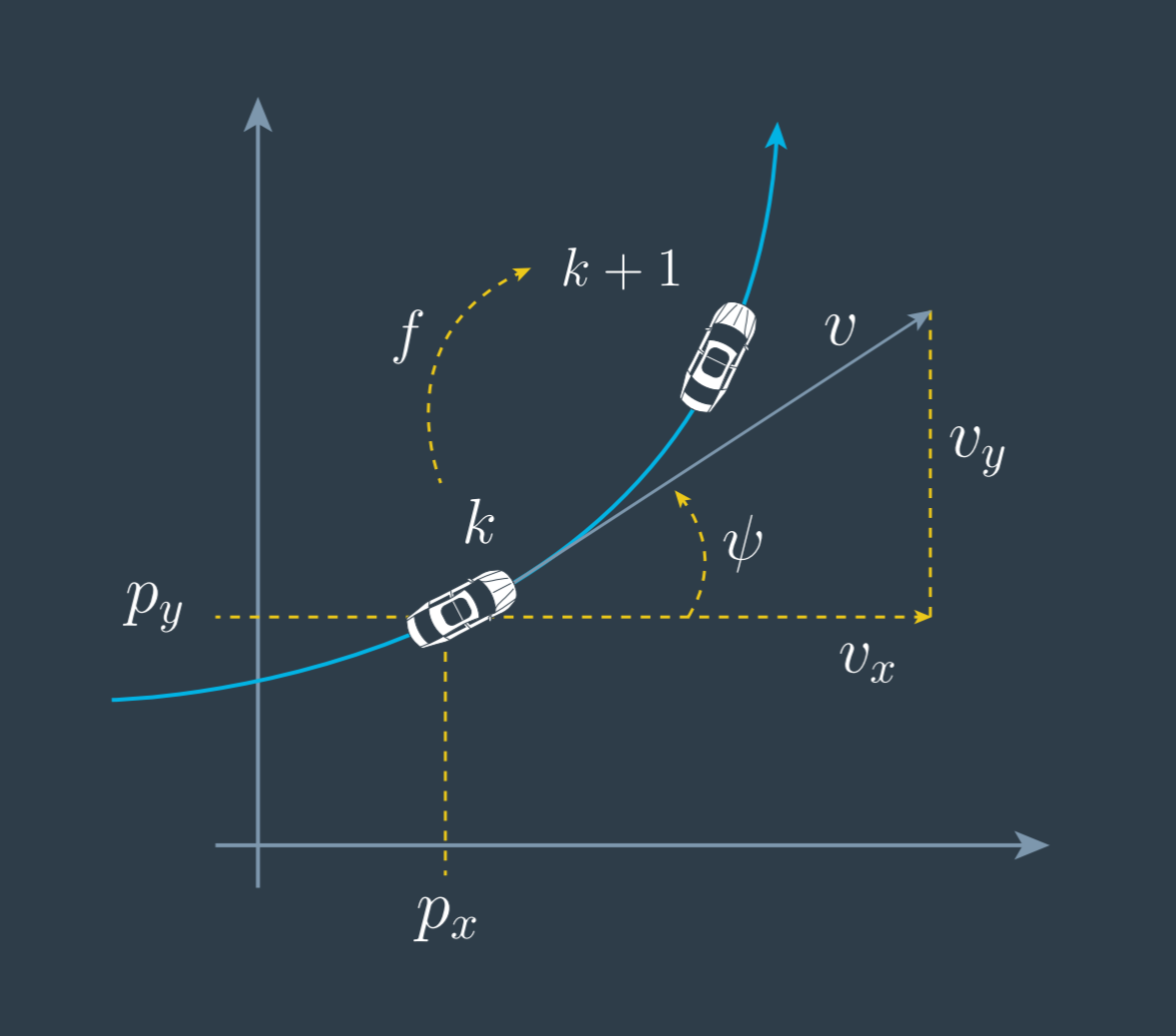
CTRV Model
The Constant Turn Rate and Constant Velocity model. One of the kinematic vehicle models.