Sitemap
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Pages

fjp.github.io
The wheel was man’s greatest invention – until he got behind it. (Bill Ireland)

Mathematics - Lagrange Multipliers and Constrained Optimization
lagrange multipliers and constrained optimization
Mathematics - Linear Algebra
Awesome list on mathematical topics
Mathematics
Awesome list on mathematical topics
Posts
Camera calibration and reprojection error
Camera calibration and reprojection error.

Porbabilistic Robotics Overview
Overview of algorithms in probabilistic robotics.

Vector Robot
Regaining access to Vector Robot and working with the Vector Python SDK.
Vim Setup and Basics
Describes how to setup vim using a popular vimrc and explains the basics.
Docker Basics
Docker Container Basics.
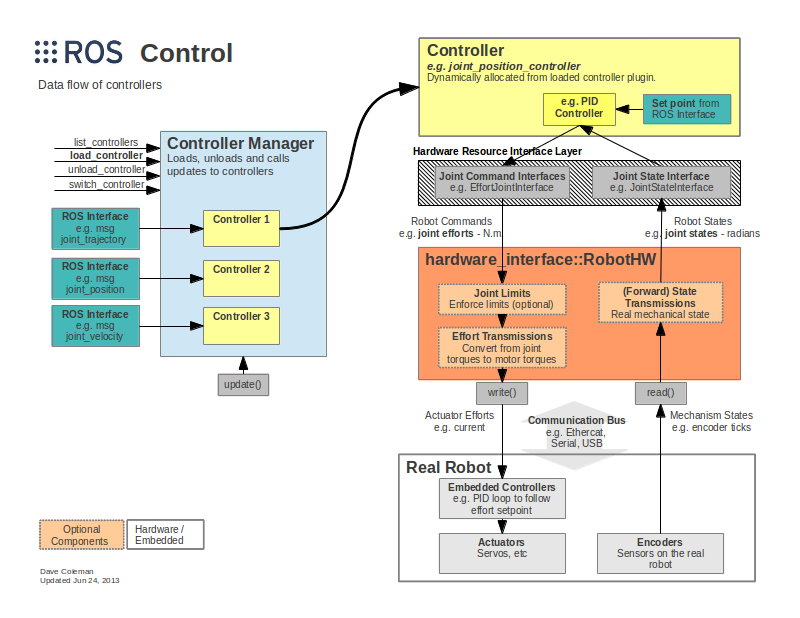
ROS Control, An overview
ROS Control combines a set of packages that include controller interfaces, controller managers, transmissions and hardware_interfaces.
Occupancy Grid Mapping
Occupancy Grid Map algorithm to map an environment.
SLAM using Grid-based FastSLAM
For Simultaneous Localization and Mapping a lot of algorithms exist. This post shows the basics of SLAM and how Grid-based FastSLAM works using ROS.
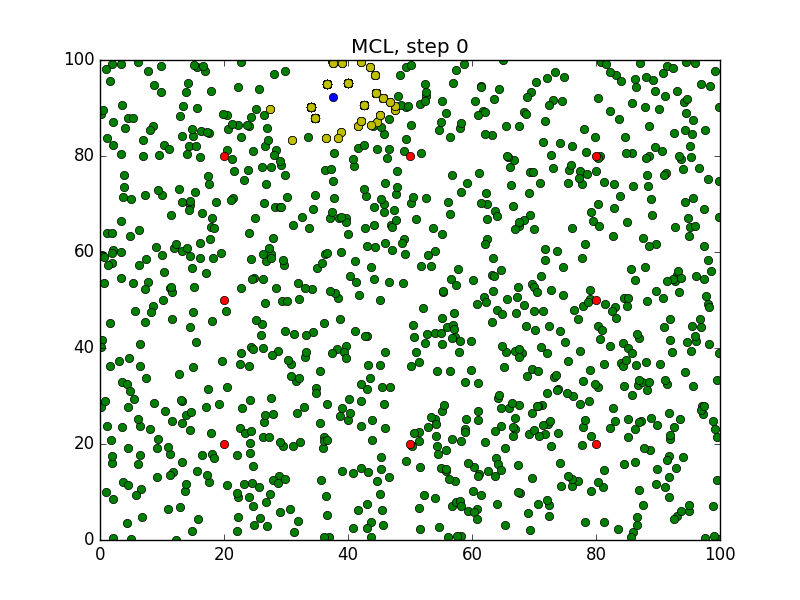
Monte Carlo Localization
Monte Carlo Localization Algorithm and C++ Implementation

ROS Kalman Filter for Sensor Fusion
The Kalman filter is used for state estimation and sensor fusion. This post shows how sensor fusion is done using the Kalman filter and ROS.
Extended Kalman Filter
The Kalman filter is used for state estimation but limited to linear models. To deal with nonlinear models the extended Kalman filter can be used instead.
Kalman Filter
The Kalman filter is used for state estimation and sensor fustion. This post explains it.
Images as Functions
Images as functions explained using matplotlib and opencv in python 3.
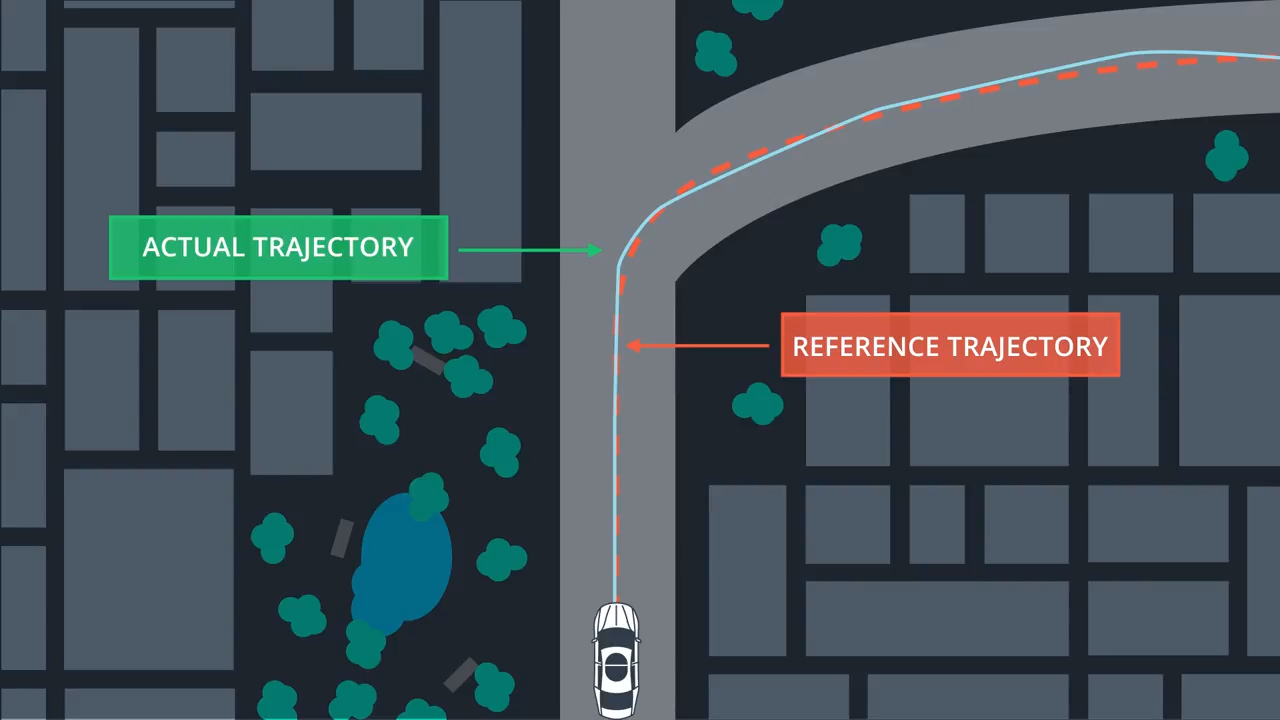
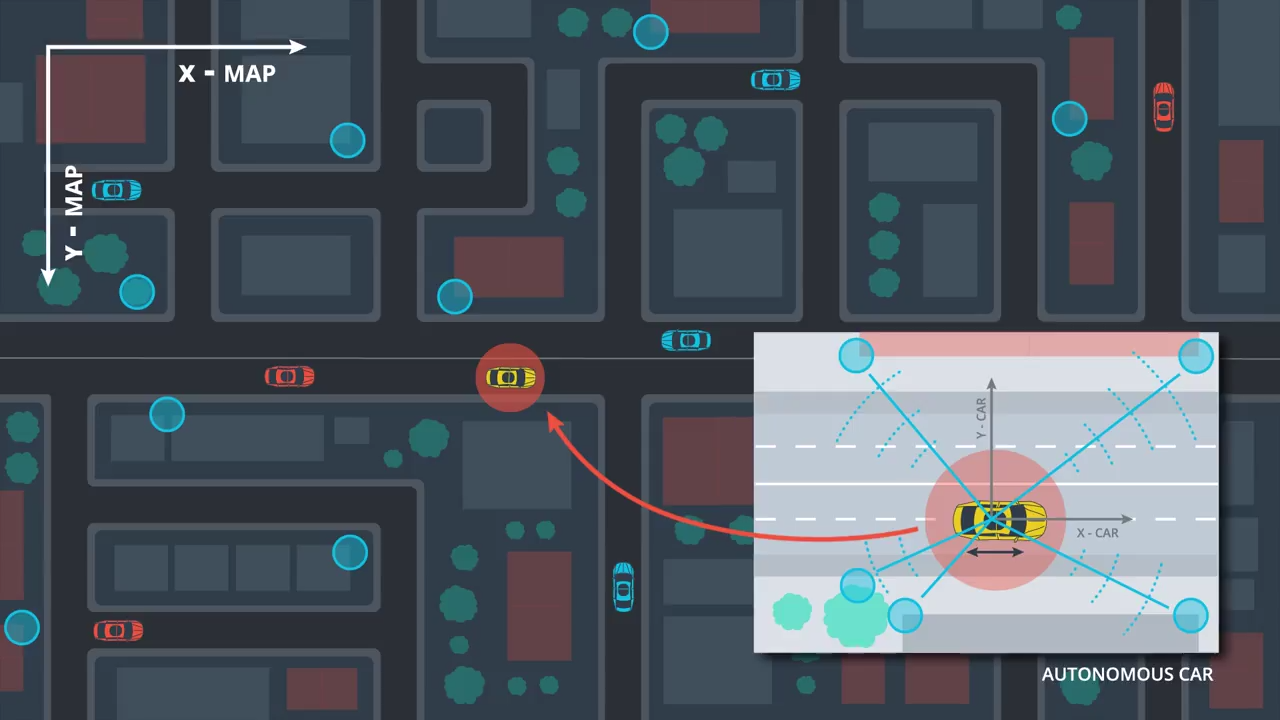
Trajectory Planning in the Frenet Space
Planning mobile robot trajectories in structured environments using a reference path and Frenet coordinates.
Interactive Bokeh for Jekyll using iPython
Extend Jekyll to include html files
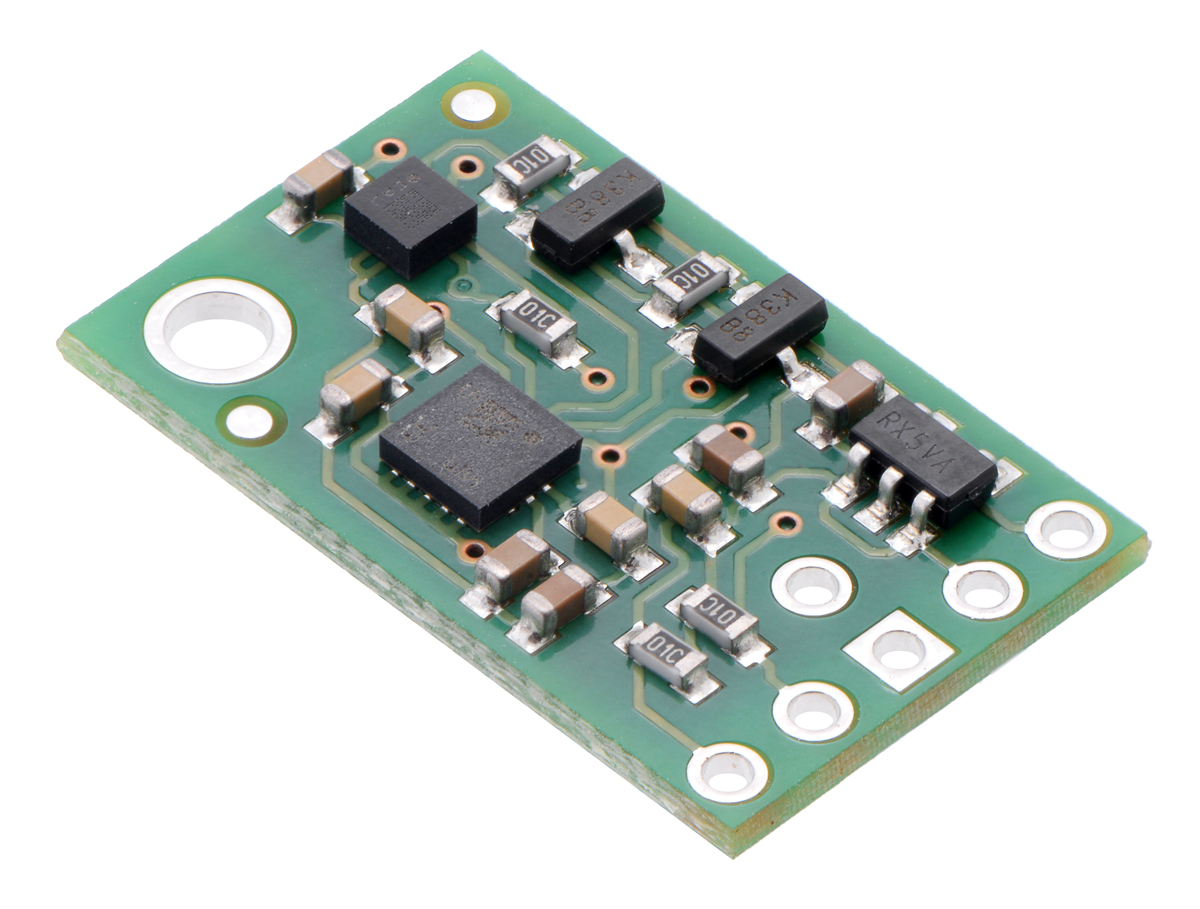
MinIMU-9 v5 and RTIMULib2
Use the Pololu MinIMU 9 v5 with the RTIMULib2.
Ubuntu 16.04 LTS Virtualbox on macOS 10.13.2 Host
Using Ubuntu 16.04 in a virtualbox on macOS.
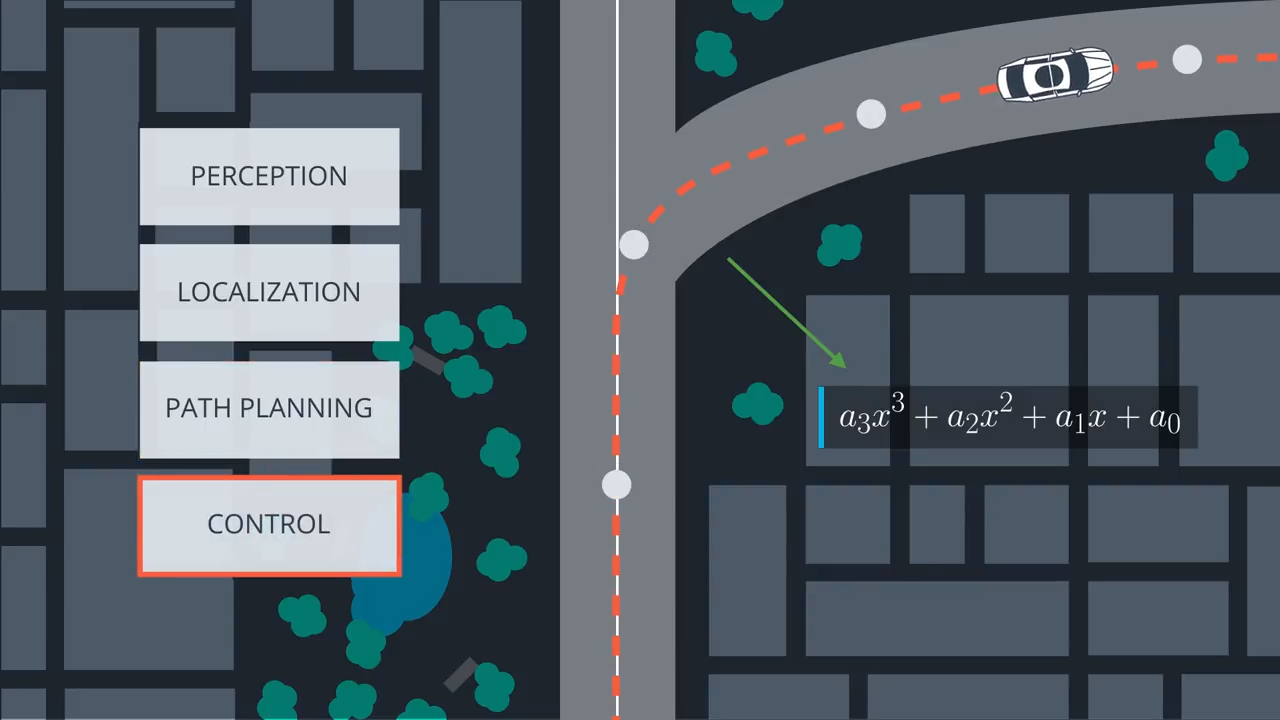
Path Planning
Virtualbox on macOS
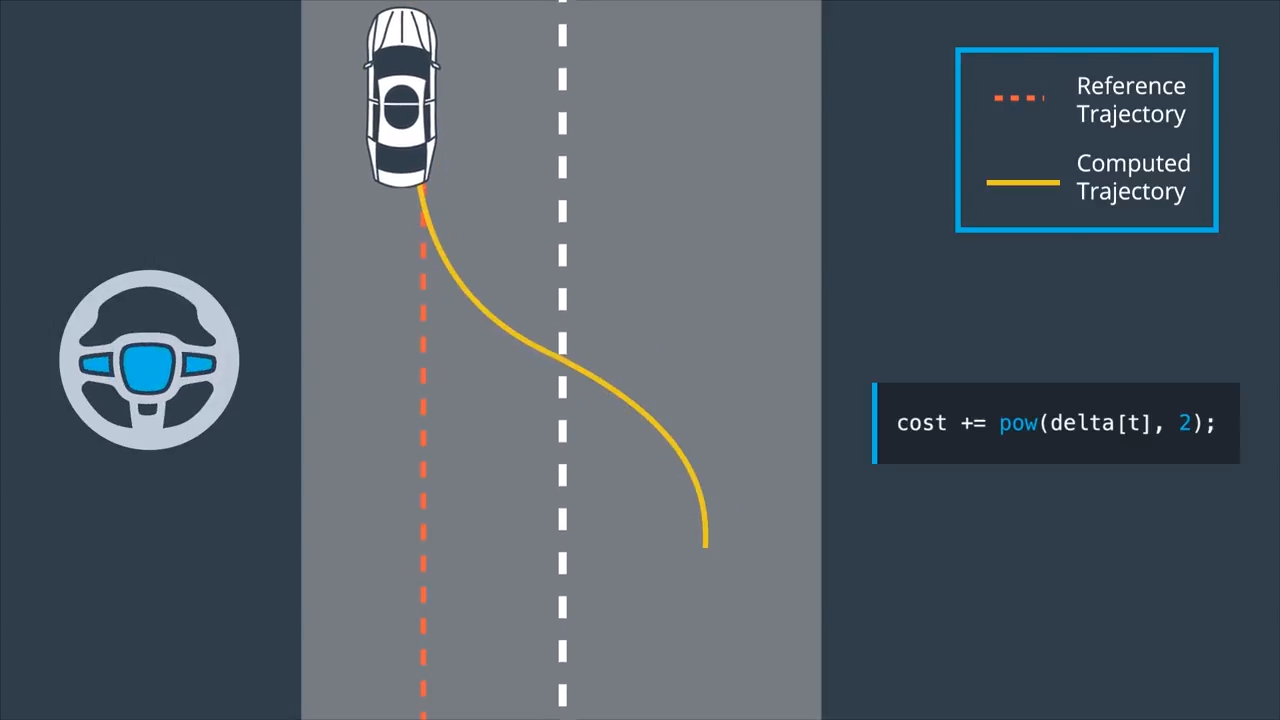
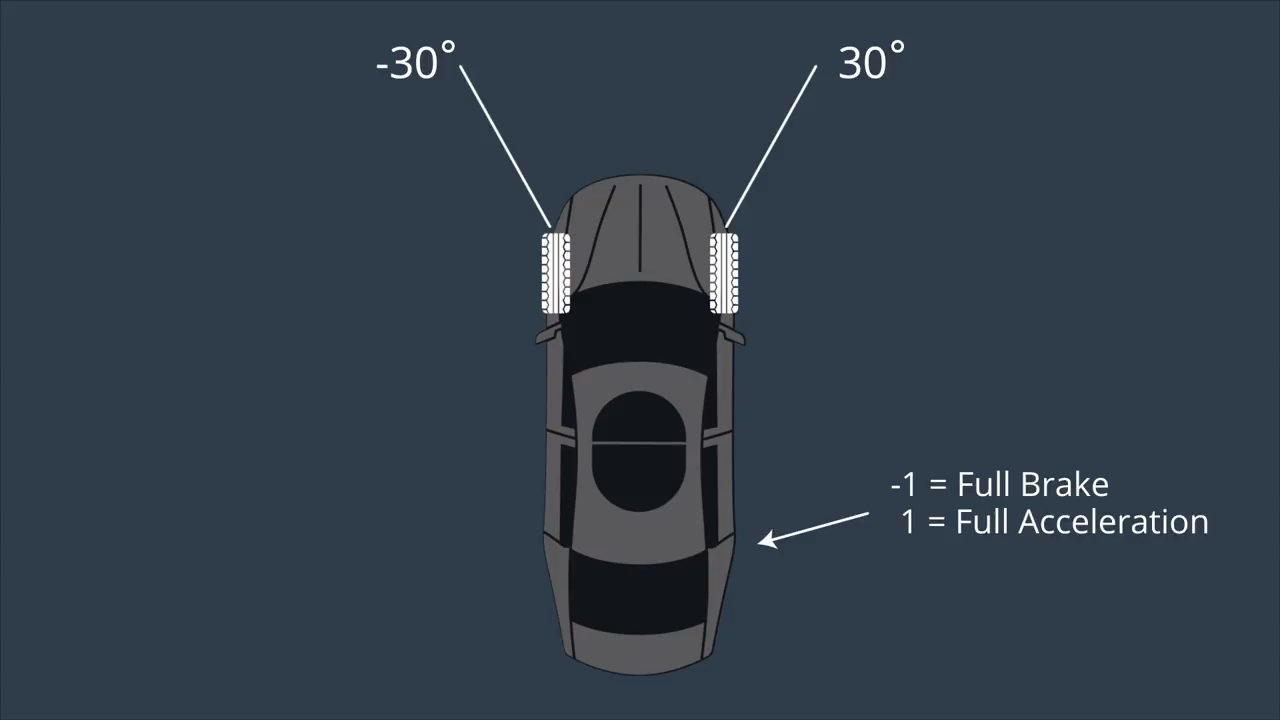
Model Predictive Control
Trajectory Optimization using Model Predictive Control (MPC) techniques.
Vehicle Models
Virtualbox on macOS
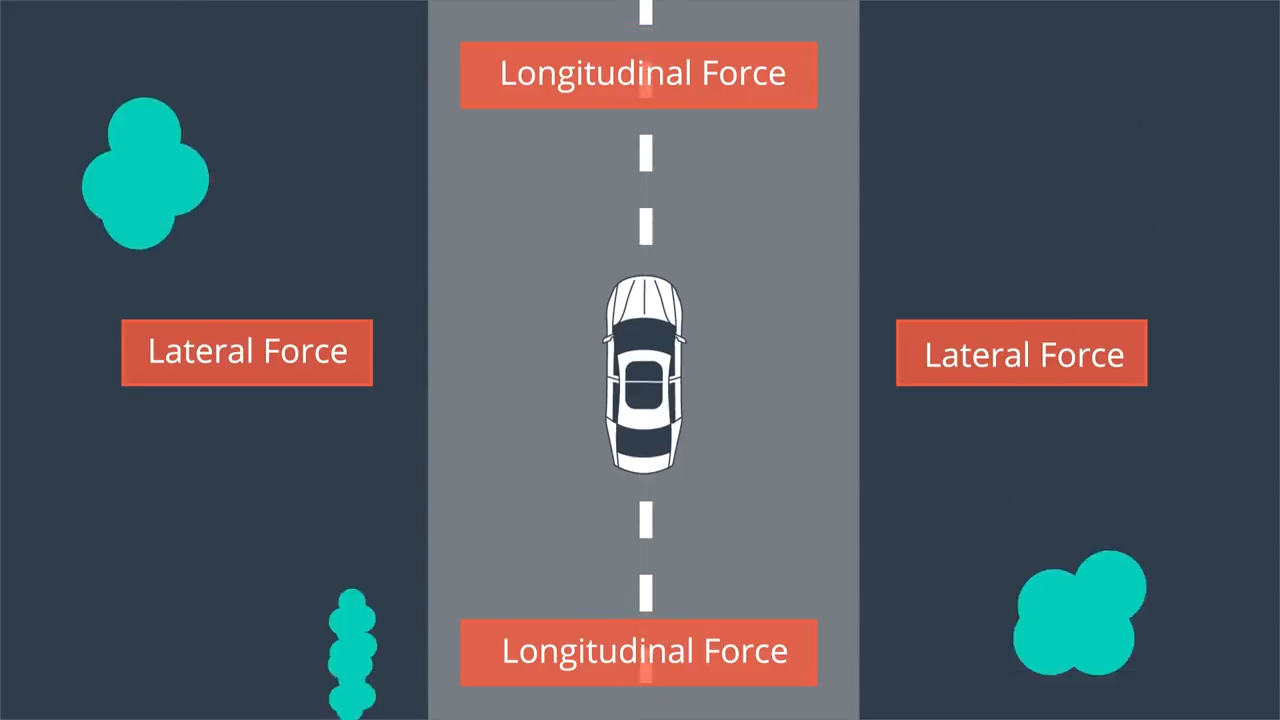
Dynamic Models
Virtualbox on macOS
Trajectory following
Virtualbox on macOS

PID Control
Virtualbox on macOS
Localization
Virtualbox on macOS
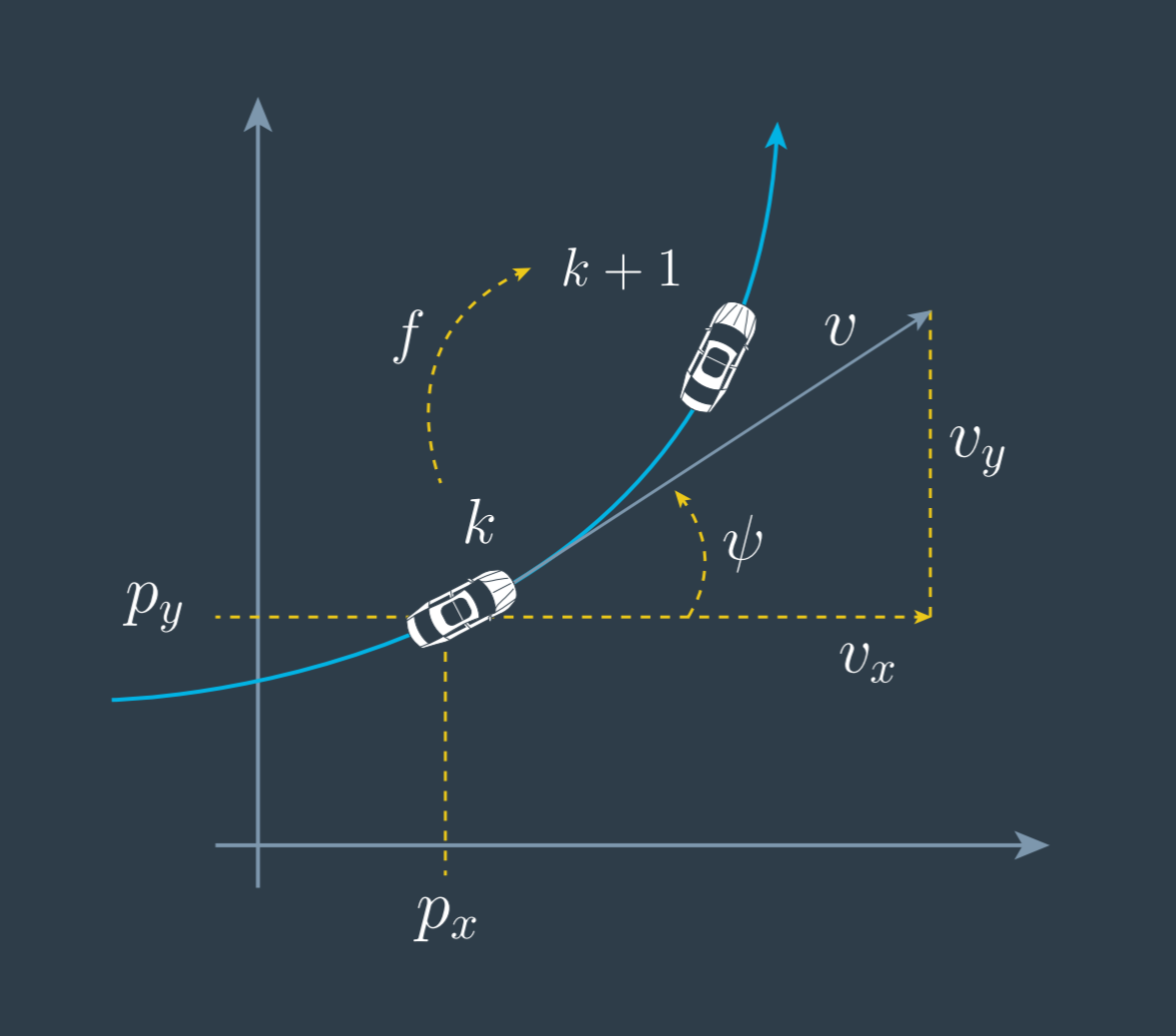
CTRV Model
A mathematical model to describe the motion of a mobile robot.
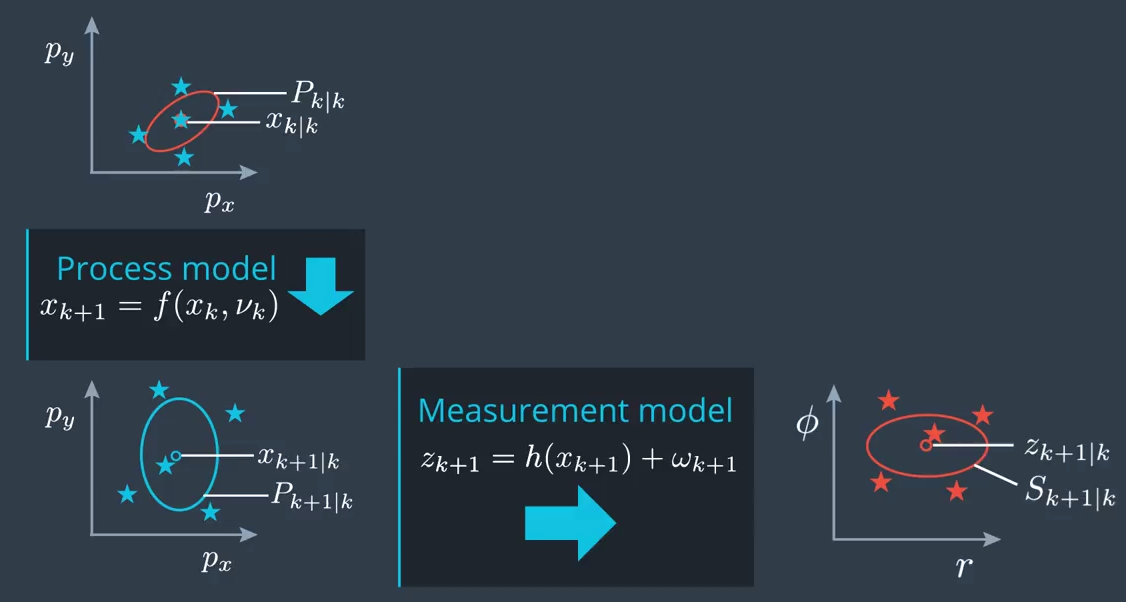
Unscented Kalman Filter
The following summarizes the important steps of the unscented Kalman filter algorithm.
autonomous-rc-car
Arduino MKR1000 and Virtualbox on Mac Host
This project aims to build a self driving rc car equipped with a Raspberry Pi 3 B+ running ROS and an Arduino MKR1000 to control the motor and the servo for ...

Autonomous RC Car Parts
This project aims to build a self driving rc car equipped with a Raspberry Pi 3 B+ running ROS and an Arduino MKR1000 to control the motor and the servo for ...

Arduino MKR1000 and rosserial servo control
Use the Arduino MKR1000 together with rosserial for steering a servo.
cpp
Programming Principles and Practice using C++
Solutions of the C++ book: Proramming Principles and Practice using C++
C++
Topics related to C++
design-patterns
Design Patterns
Awesome list of Design Patterns
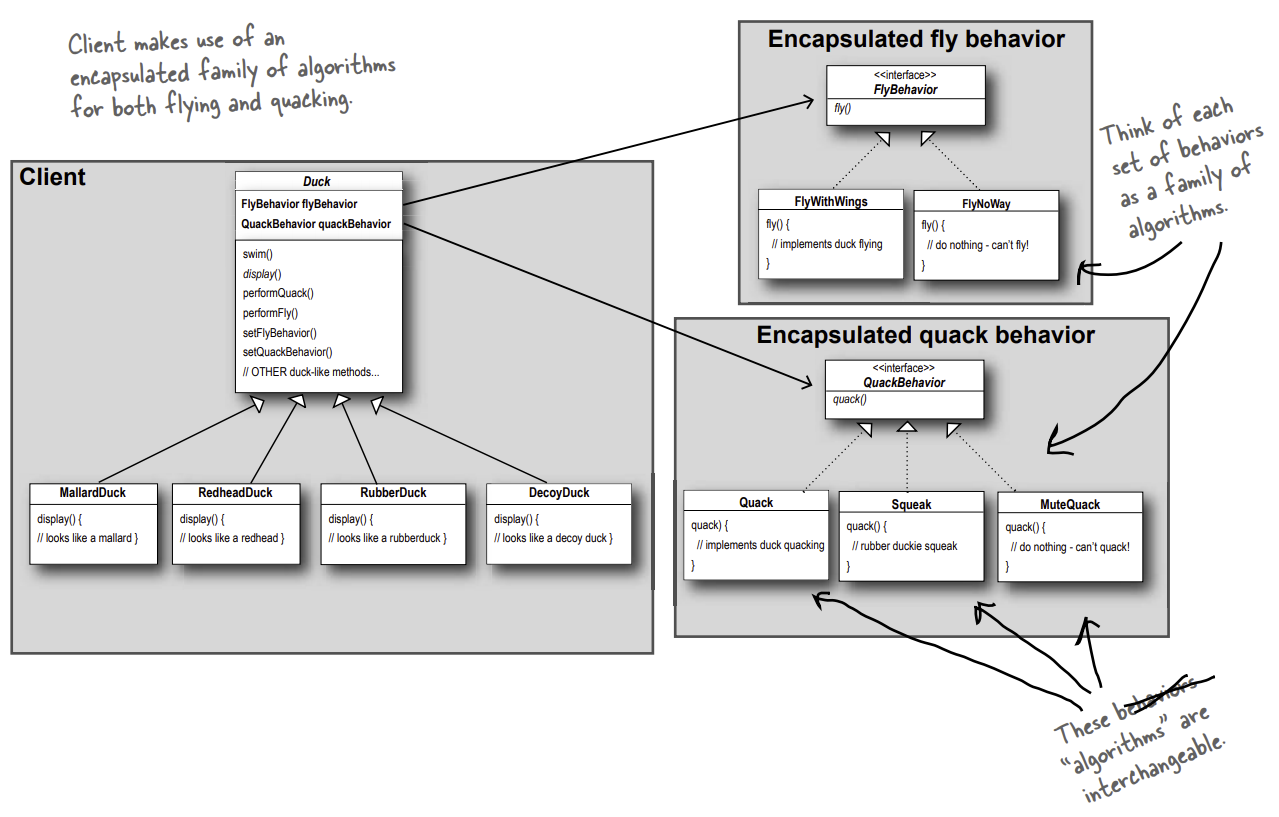
The Strategy Pattern
The strategy design pattern summarized.
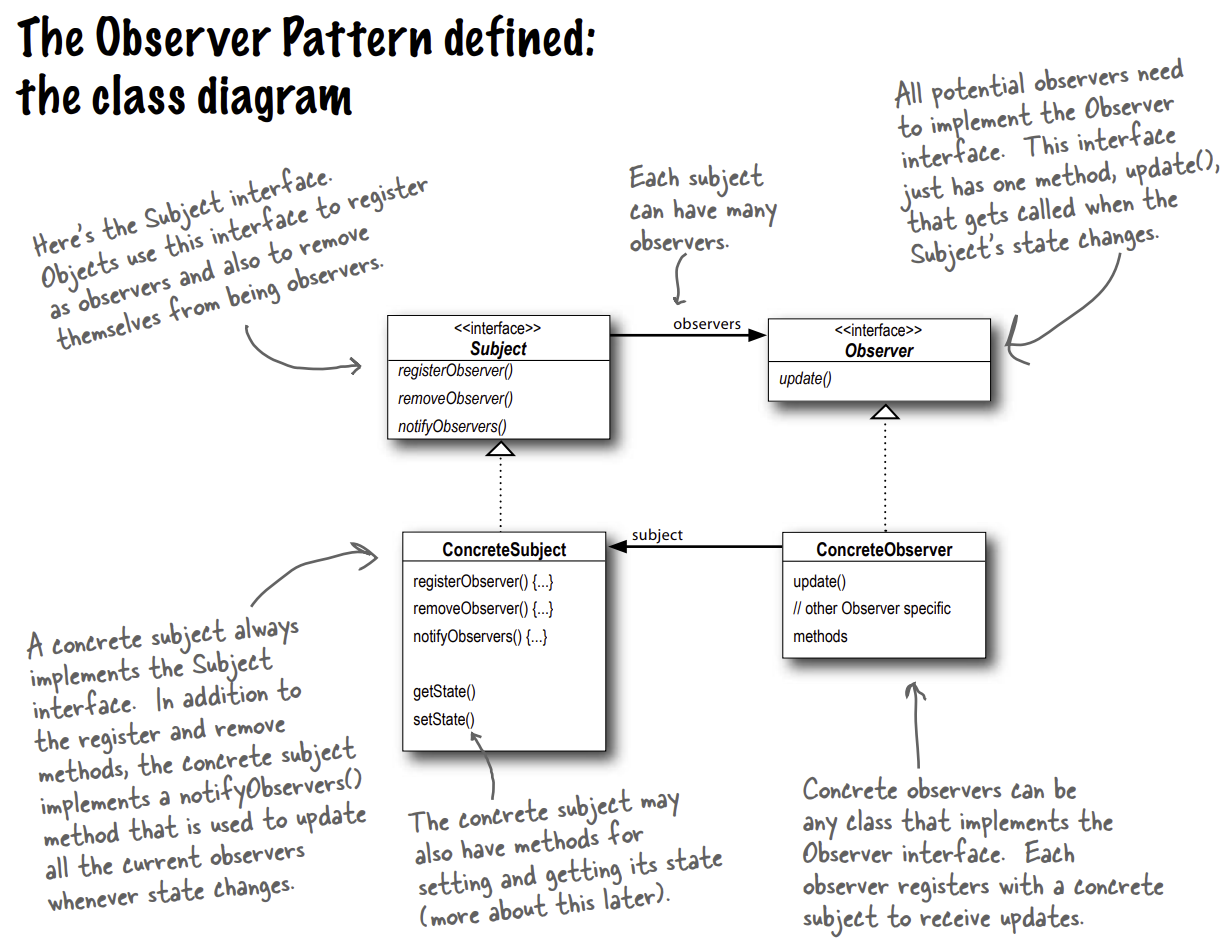
The Observer Pattern
The strategy design pattern summarized.
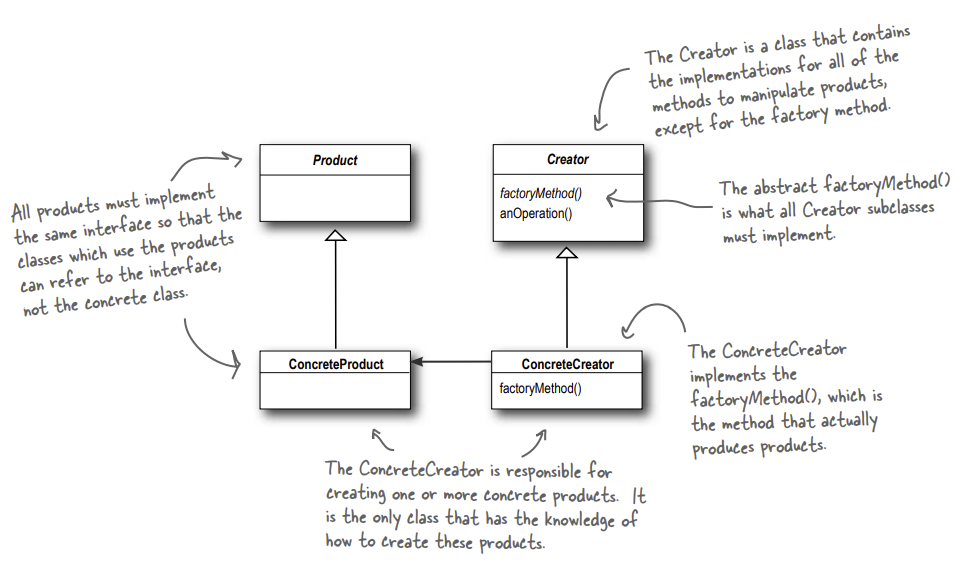
The Factory Pattern
The factory design pattern summarized.
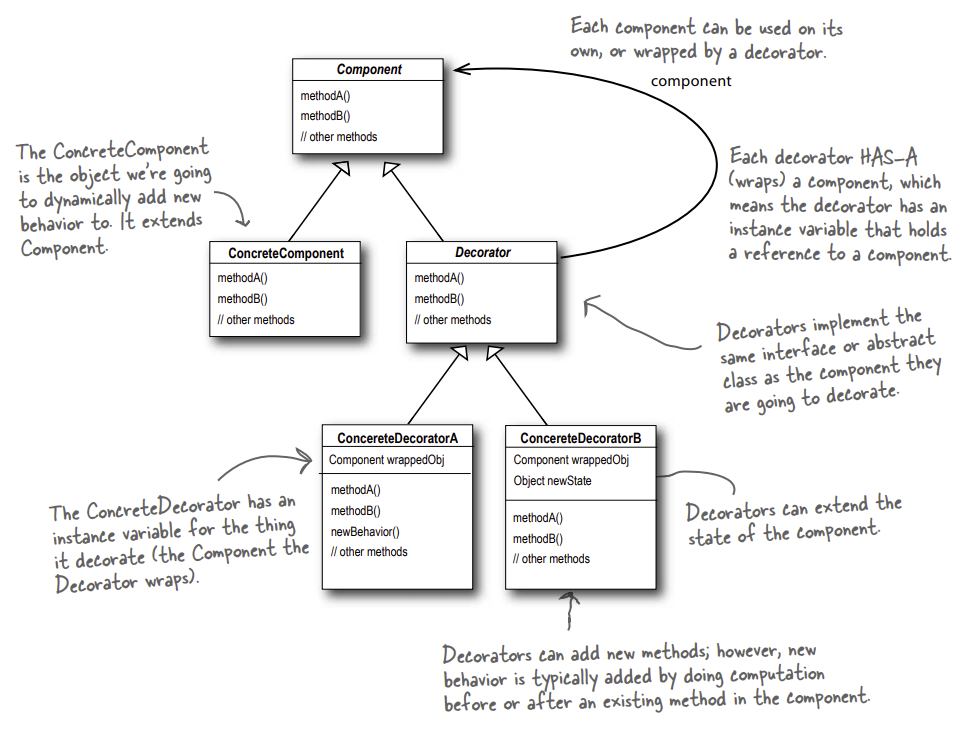
The Decorator Pattern
The decorator design pattern summarized.
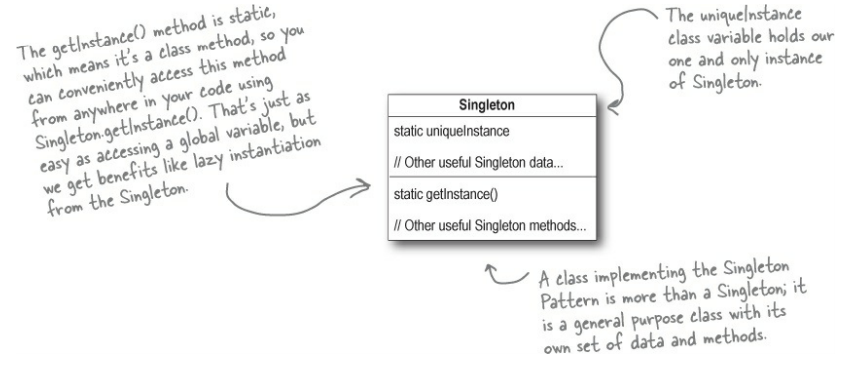
The Singleton Pattern
The singleton design pattern summarized.
The Builder Pattern
The builder design pattern summarized.
The Monad Pattern
The monad design pattern summarized.
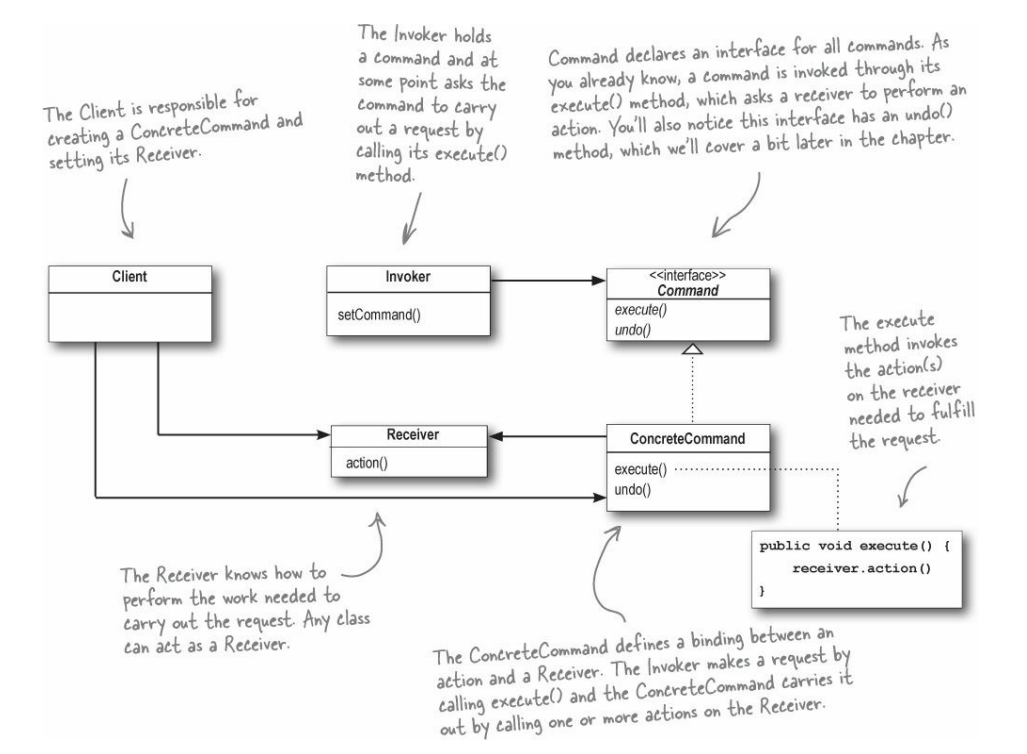
The Command Pattern
The command design pattern summarized.
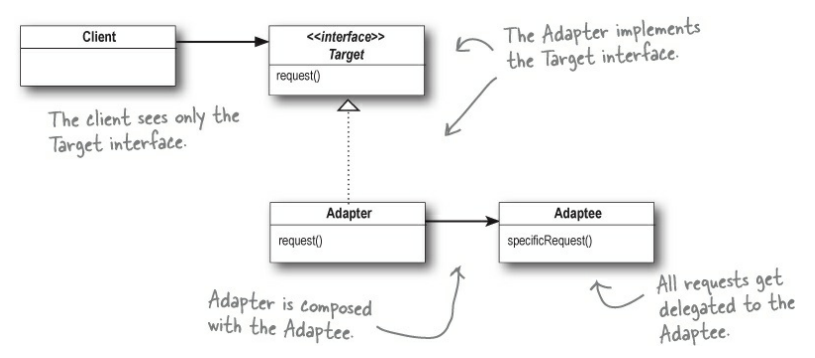
The Adapter Pattern
The adapter design pattern summarized.
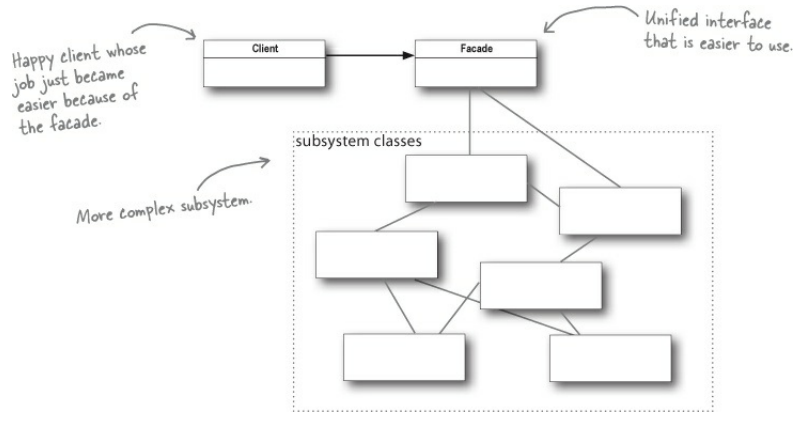
The Facade Pattern
The facade design pattern summarized.
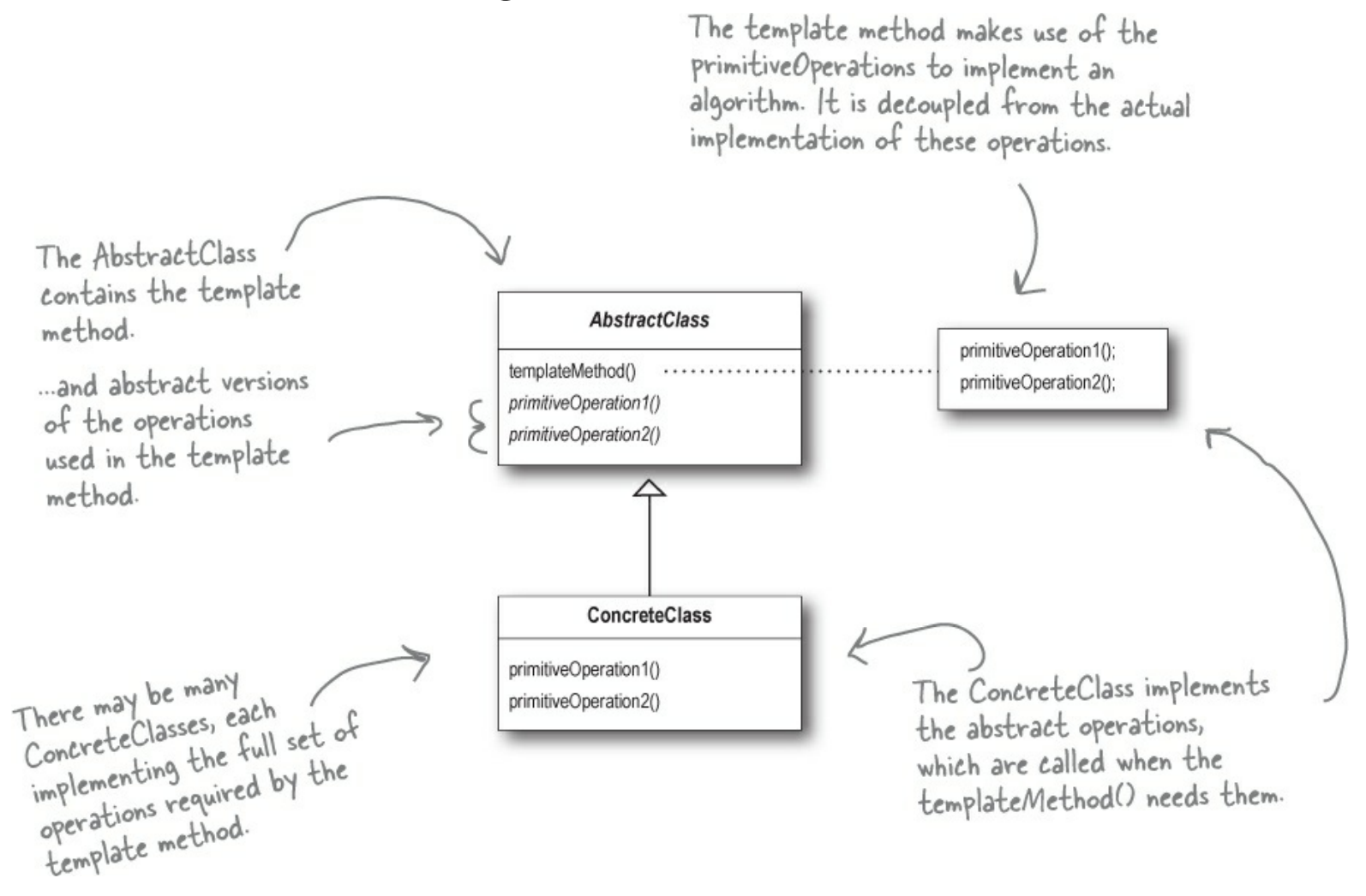
The Template Method Pattern
The template method design pattern summarized.
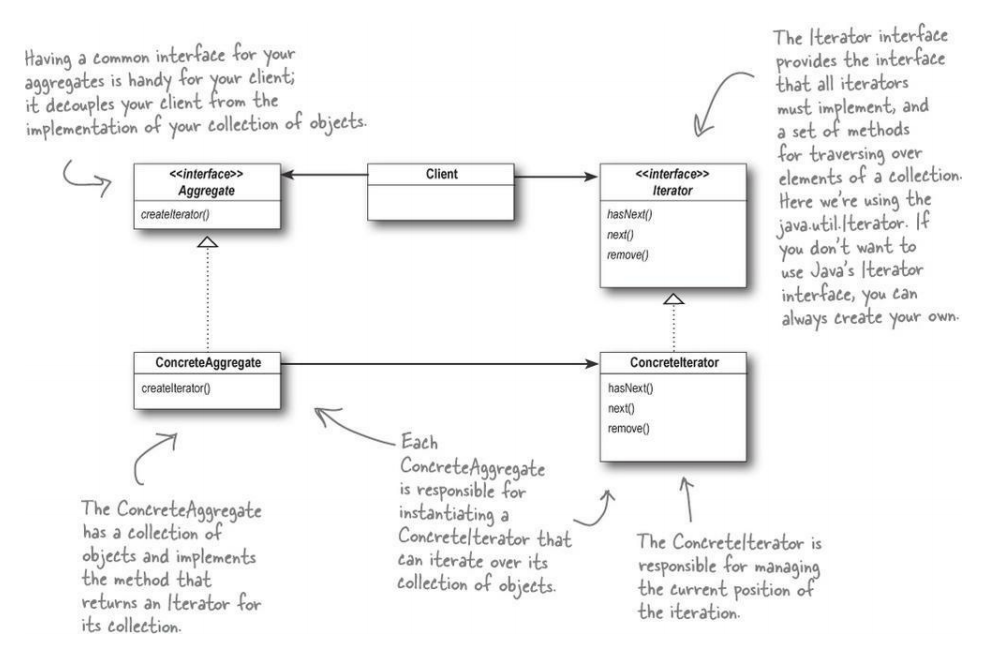
The Iterator Pattern
The iterator design pattern summarized.
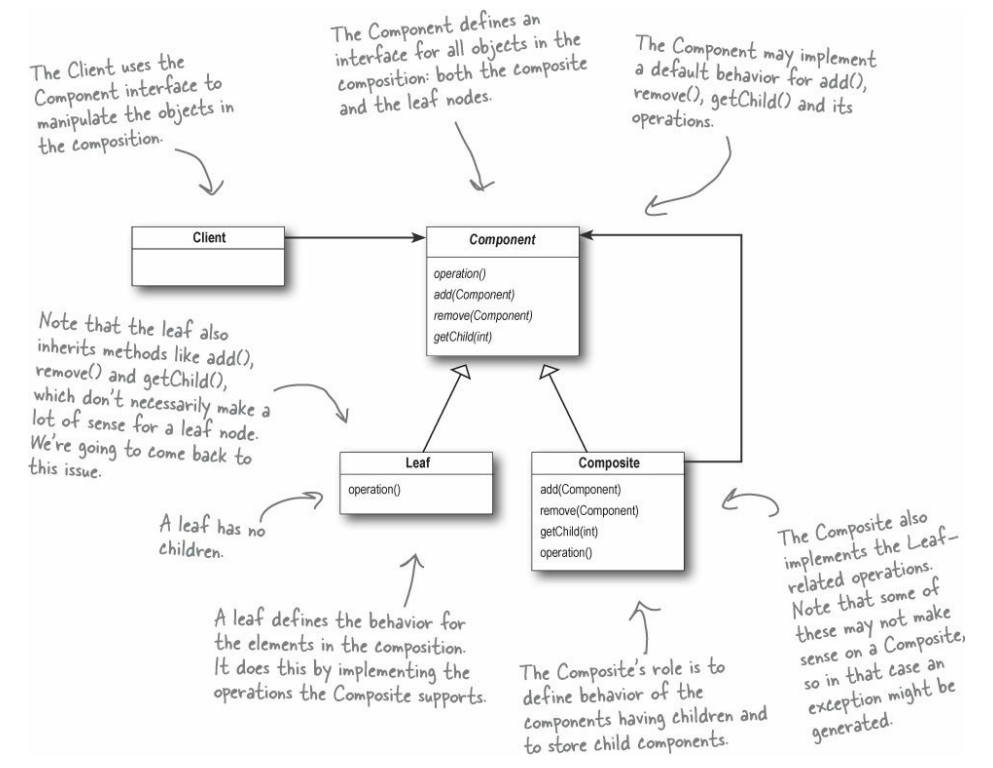
The Composite Pattern
The composite design pattern summarized.
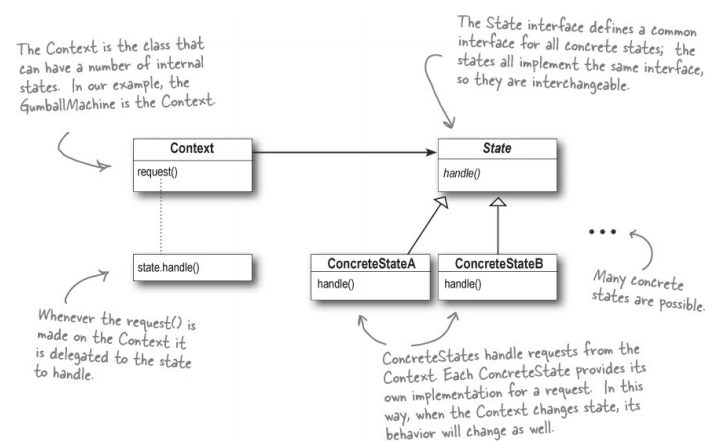
The State Pattern
The state design pattern summarized.
The Model View Controller Pattern
The model view controller design pattern summarized.
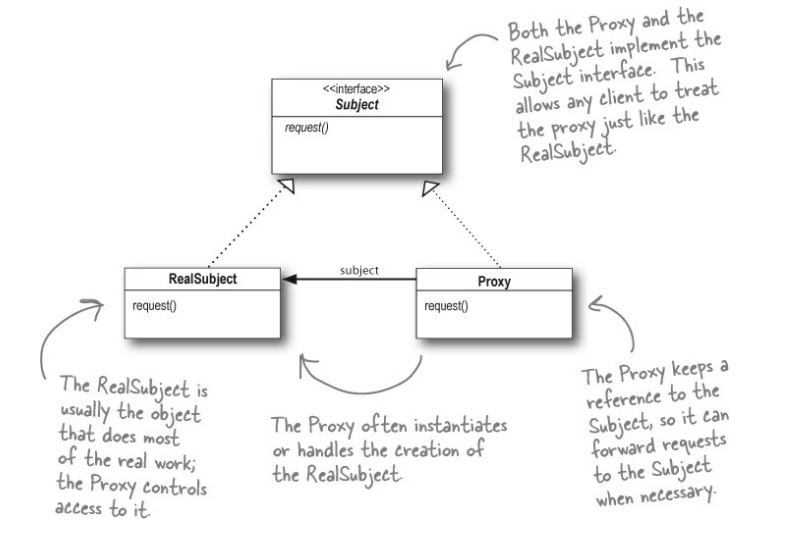
The Proxy Pattern
The proxy design pattern summarized.
diffbot
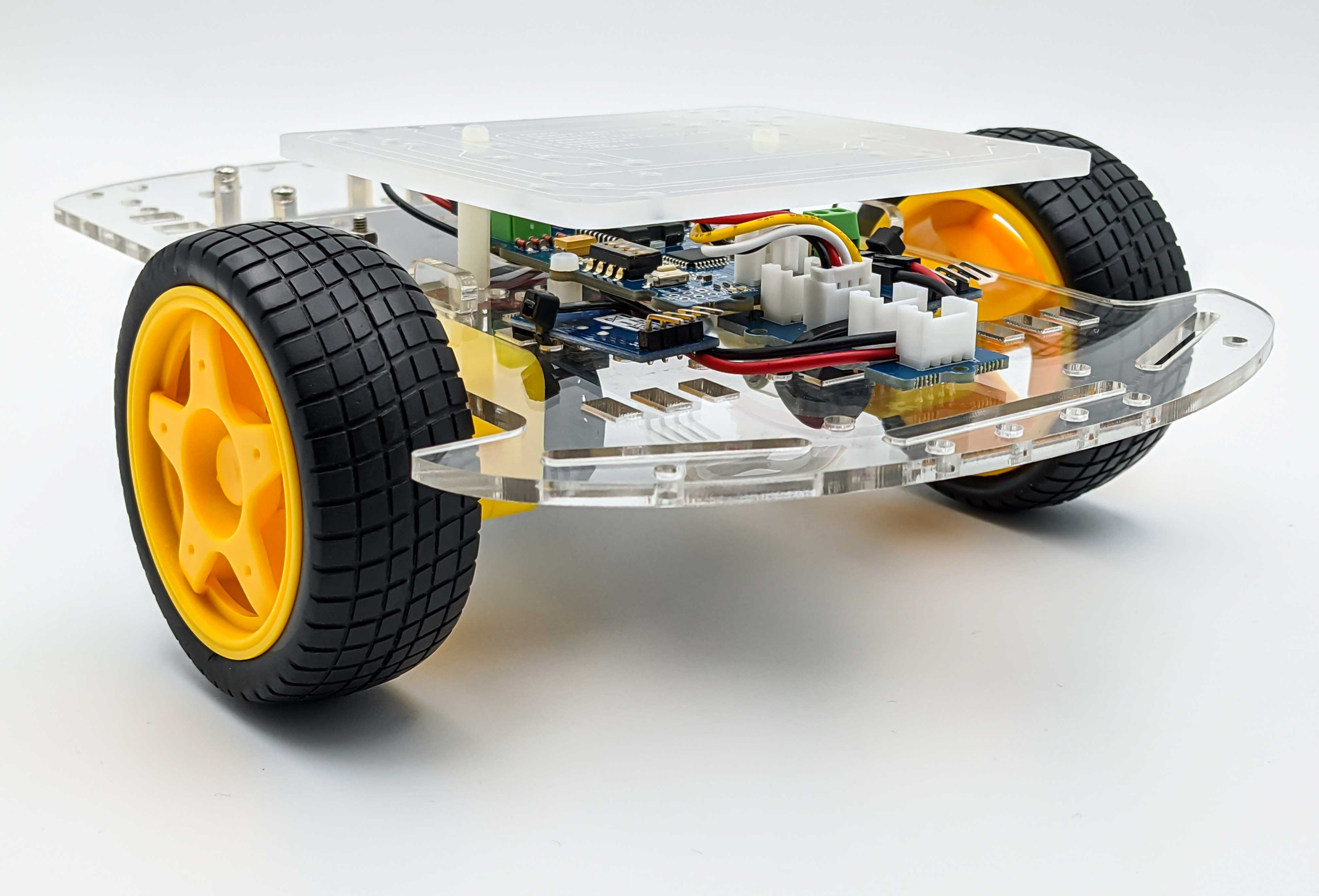
Autonomous 2WD Robot
Autonomous 2WD Robot equipped with a Raspberry Pi 4 B running ROS Noetic to sense and act in an environment.
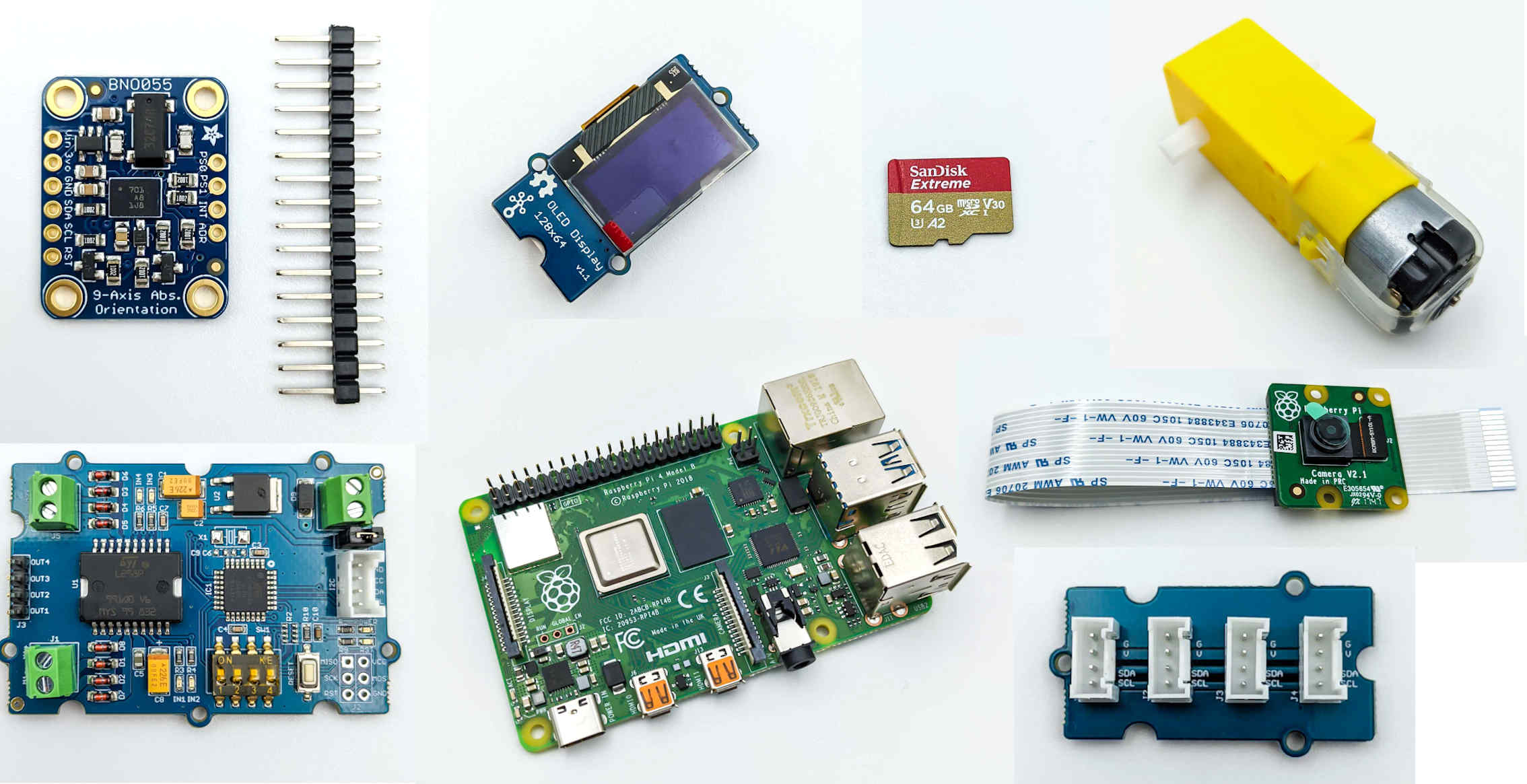
Autonomous 2WD Robot - Components
Components of an autonomous 2WD Robot equipped with a Raspberry Pi 4 B running ROS melodic to sense and act in an environment.
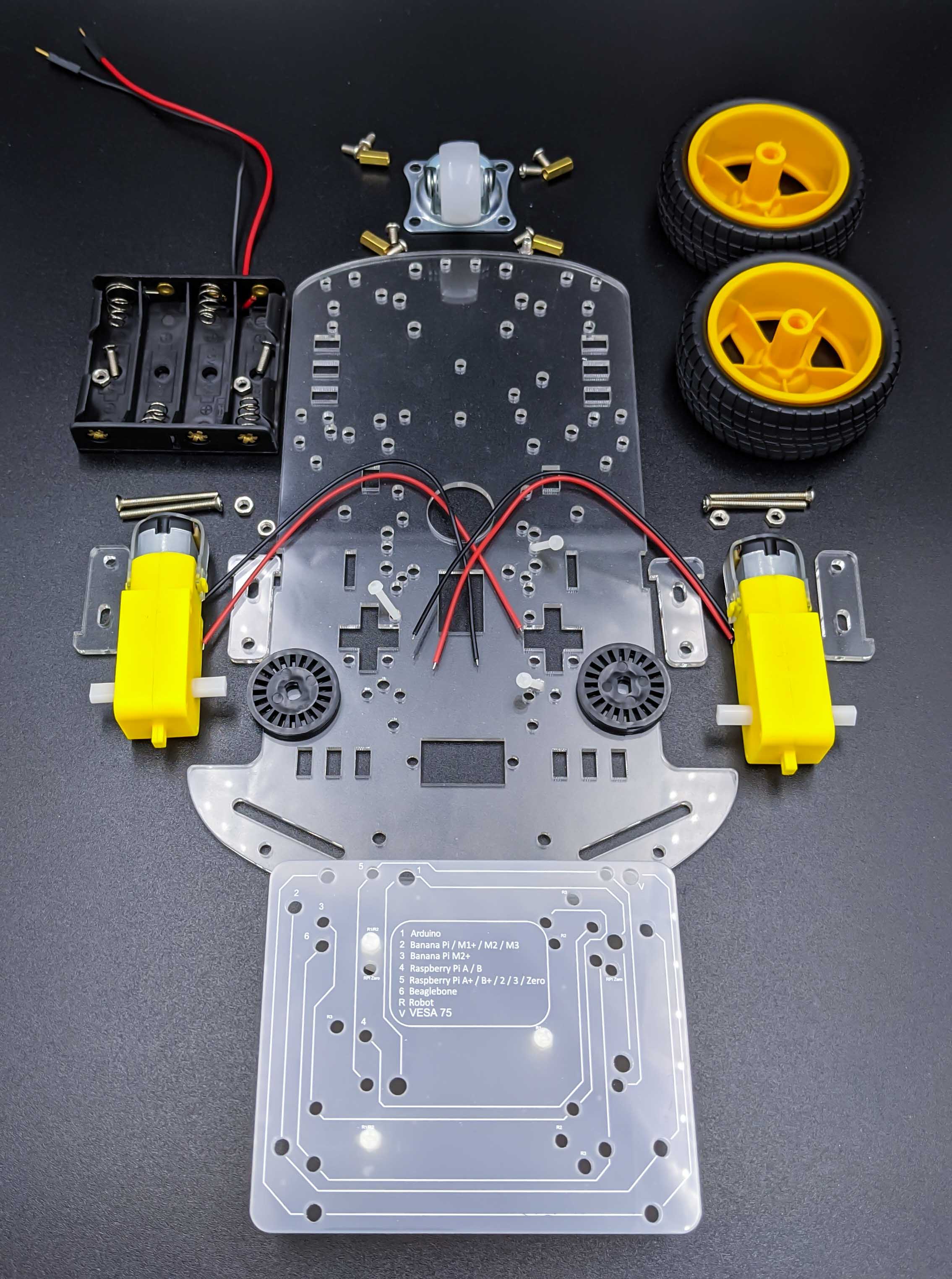
Autonomous 2WD Robot - Assembly
Assembly of an autonomous 2WD Robot equipped with a Raspberry Pi 4 B running ROS melodic to sense and act in an environment.

Autonomous 2WD Robot - RPi 4 Ubuntu Bionic
Ubuntu 18.04 Bionic Setup on Raspberry Pi 4 for an autonomous 2WD Robot running ROS Noetic to sense and act in an environment.
Autonomous 2WD Robot - Hardware Interfaces
Hardware Interfaces on Raspberry Pi 4 for an autonomous 2WD Robot running ROS melodic to sense and act in an environment.
Autonomous 2WD Robot - Control Package
ROS Control Package for ROS Noetic running on a Raspberry Pi 4 for an autonomous 2WD Robot to act in an environment according to sensor information.
Autonomous 2WD Robot - Robot Description Package
ROS Robot Description Package for ROS Melodic running on a Raspberry Pi 4 for an autonomous 2WD Robot to act in an environment according to sensor information.
Autonomous 2WD Robot - ROS Noetic
ROS Noetic Setup on Raspberry Pi 4 for an autonomous 2WD Robot running ROS melodic to sense and act in an environment.
Autonomous 2WD Robot - ROS Packages and Nodes
ROS Packages and Nodes for ROS Melodic running on a Raspberry Pi 4 for an autonomous 2WD Robot to act in an environment according to sensor information.
Autonomous 2WD Robot - Odometry Package
ROS Odometry Package for ROS Noetic running on a Raspberry Pi 4 for an autonomous 2WD Robot to localize itself.

Autonomous 2WD Robot - ROS Network Setup
ROS Noetic Network Setup between a Work Machine and ROS running on a Raspberry Pi 4 for an autonomous 2WD Robot.

Autonomous 2WD Robot - Perception Package
ROS Perception Package for ROS Melodic running on a Raspberry Pi 4 for an autonomous 2WD Robot to act in an environment according to sensor information.
Autonomous 2WD Robot - Integrating a Robot into ROS
Integrating an autonomous 2WD robot into ROS.
Autonomous 2WD Robot - Theory of Components
Theory behind the components of the autonomous 2WD differential drive robot.
Autonomous 2WD Robot - Gazebo Package
ROS Gazebo Package for ROS Melodic running on a Raspberry Pi 4 for an autonomous 2WD Robot to act in an environment according to sensor information.
Autonomous 2WD Robot - Theory and Planning
Theory behind an autonomous 2WD Robot equipped with a Raspberry Pi 4 B running ROS Noetic to sense and act in an environment.
Autonomous 2WD Robot - Navigation Package
ROS Navigation Package for ROS Noetic running on a Raspberry Pi 4 for an autonomous 2WD Robot to act in an environment according to sensor information.
fpv
Race Quad Components
Components of the fpv race quad.

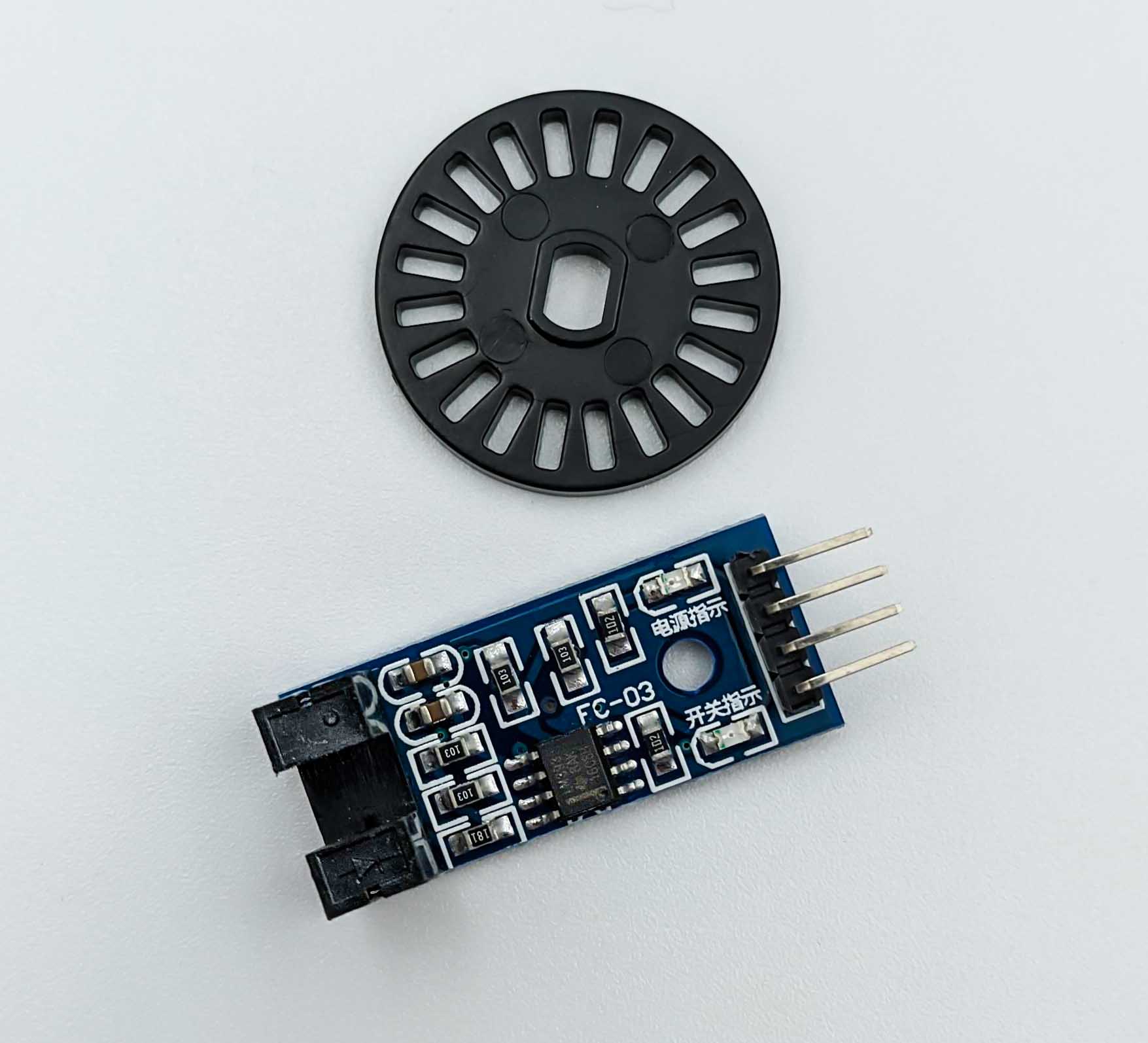
The Frame and its Components
The frame of a fpv quad and its parts.
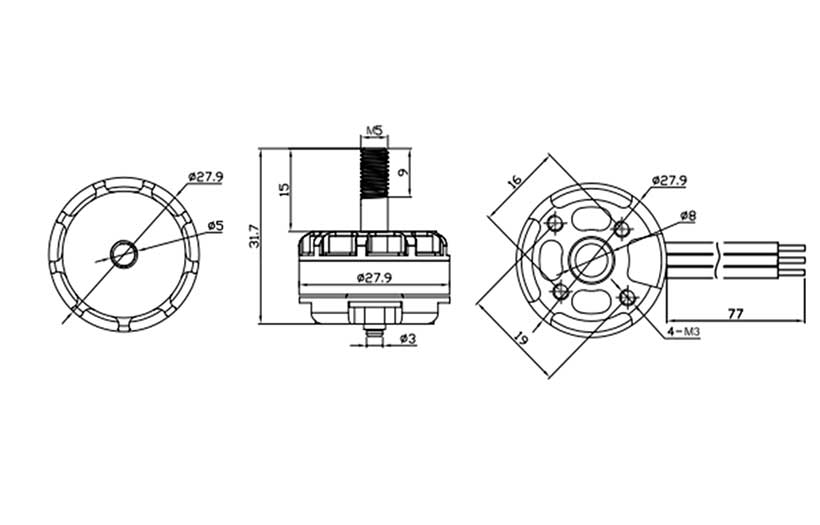
The Motor and how it works
The motors of a FPV quad explained.

Taranis X9D Plus SE 2019 - OpenTX and EU-LBT/FCC Firmware
All about the bootloader, OpenTX and firmware of the Taranis X9D Plus SE 2019.

FrSky R-XSR Receiver
All about the R-XSR SmartPort and FPort Receiver from FrSky.

Assembly of a Race Quad
The Assembly of a FPV Race Quad.

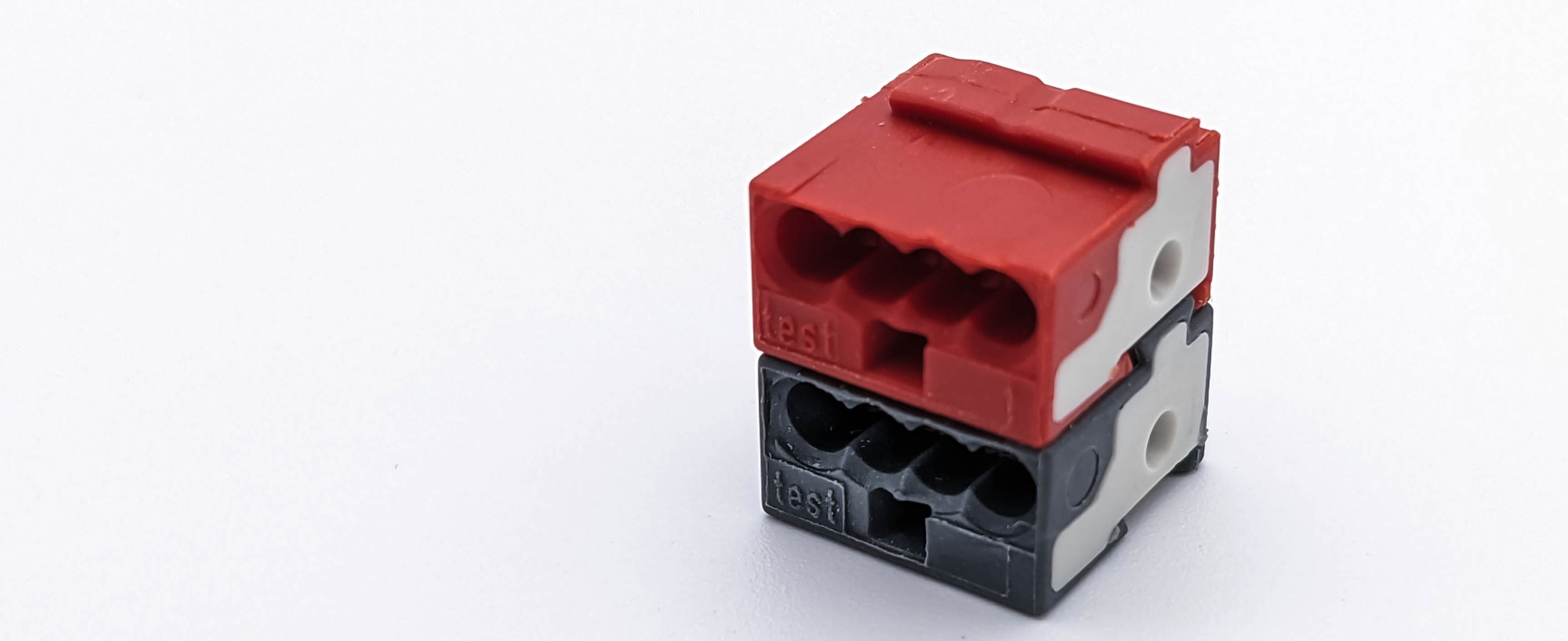
The Brushless Controller ESC
An Electronic Speed Controller (ESC) controls a brushless dc motor with input from the Flight Controller.
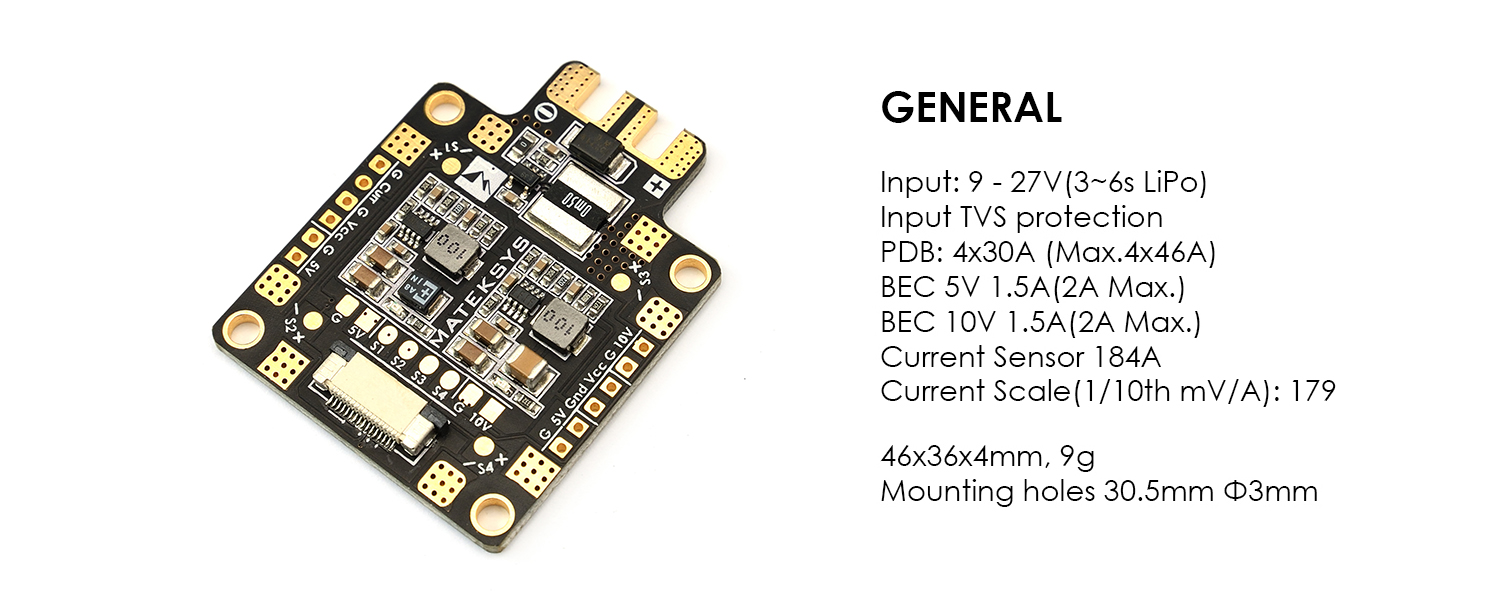
The Power Distribution Board
The Power Distribution Board (PDB) distributes power from the battery to the rest of a copter’s components.
Flight Controller Software
Software for a Flight Controller and its configuration aspects.
Taranis X9D Plus SE 2019 - PID Tuning Lua Script
Setting up PID Tuning via a Lua Script on the Taranis X9D Plus SE 2019.
Taranis X9D Plus SE 2019 - Telemetry
All about telemetry and the steps to set it up on flight controller, receiver and transmitter.
Setting up Throttle Curves
How to setup different throttle curves on the Taranis X9D Plus SE 2019.
Taranis X9D Plus SE 2019 - Telemetry
All about RC Rate and EXPO for the RC transmitter.

The Propeller
The Propeller transforms the energy from the battery into velocity.
FPV Glossar
Glossar for FPV terms
home-automation
ESP8266 MQTT Temperature Humidity
Home Automation with the ESP8288 as MQTT Client that publishes temperature and humidity using a DHT22 sensor.

Home Automation - Raspberry Pi Setup
Setup Home Assistant on an Raspberry Pi with Raspberry Pi OS running on an SSD.

Home Automation - KNX
Intelligent Home with Voltus - An Effortless Journey to Home Automation
KNX Light Switches and Presence Detectors
The Perfect Blend of Elegance and Technology: Berker and Busch Jäger Light Switches and Presence Detectors
projects
Autonomous RC Car
Autonomous RC Car equipped with a Raspberry Pi running ROS and Arduino to control its servos.
Home Automation - Raspberry Pi Setup
Home Automation based on KNX and Home Assistant.
Introduction to FPV
Build instructions for an FPV race quad.
ros
ROS rqt plugin for turtlesim
Plugin for ROS rqt to draw in turtlesim using turtlebot.
ROS Turtle Pong
Pong game for ROS turtlesim.