Extended Kalman Filter
The Kalman filter is used for state estimation but limited to linear models. To deal with nonlinear models the extended Kalman filter can be used instead.
The Kalman filter is used for state estimation but limited to linear models. To deal with nonlinear models the extended Kalman filter can be used instead.
The Kalman filter is used for state estimation and sensor fustion. This post explains it.
Images as functions explained using matplotlib and opencv in python 3.
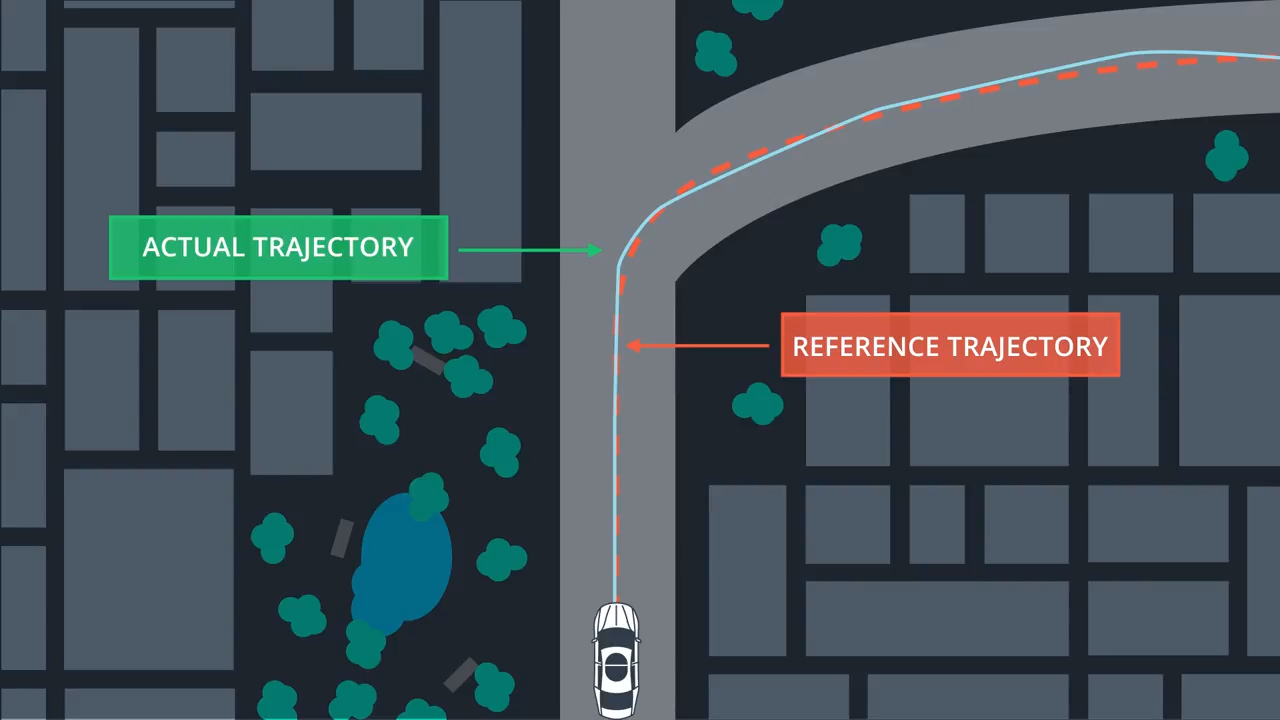
Planning mobile robot trajectories in structured environments using a reference path and Frenet coordinates.
Extend Jekyll to include html files