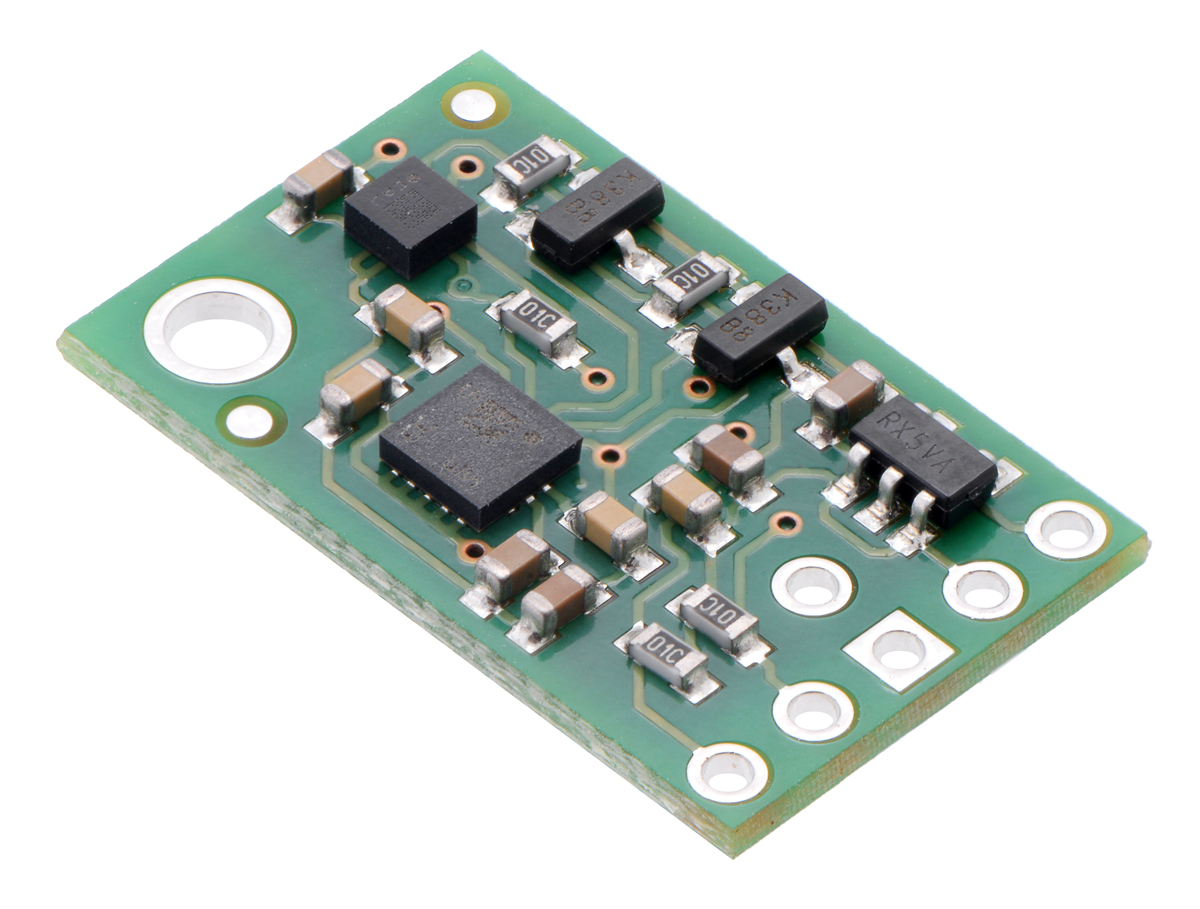
MinIMU-9 v5 and RTIMULib2
Use the Pololu MinIMU 9 v5 with the RTIMULib2.
Use the Pololu MinIMU 9 v5 with the RTIMULib2.
Using Ubuntu 16.04 in a virtualbox on macOS.
Virtualbox on macOS
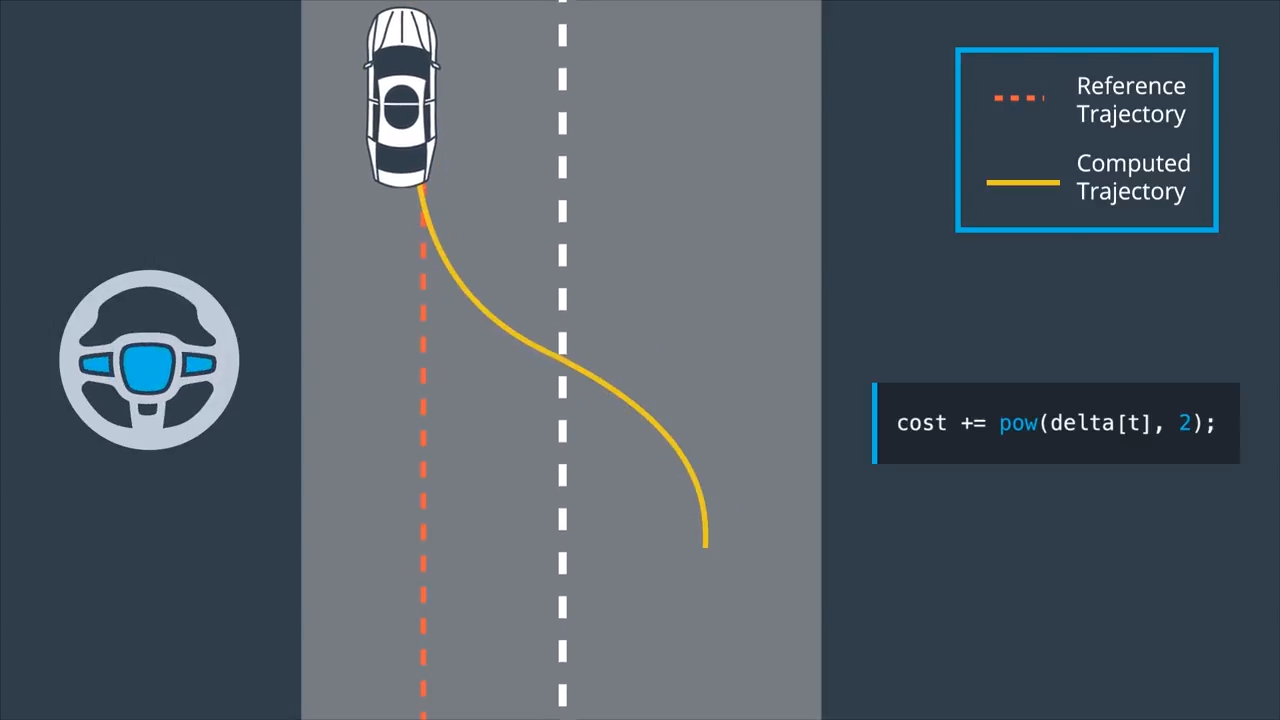
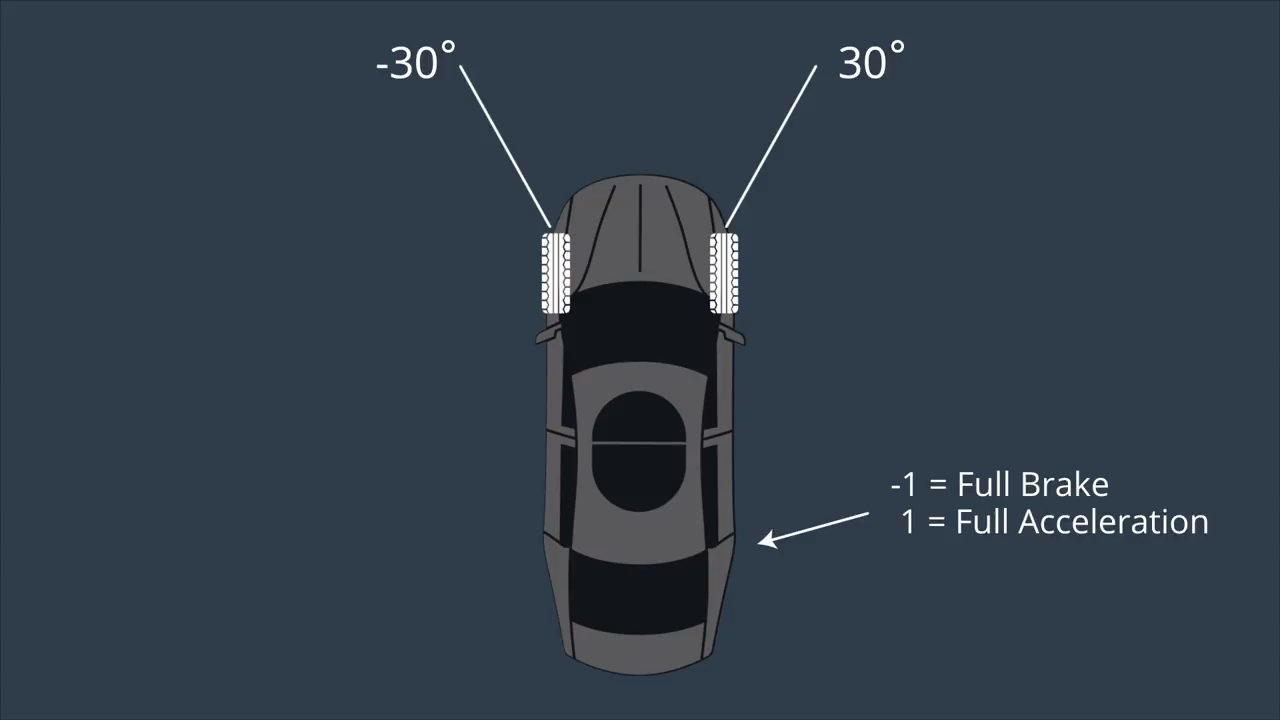
Trajectory Optimization using Model Predictive Control (MPC) techniques.
Virtualbox on macOS