ROS Control, An overview
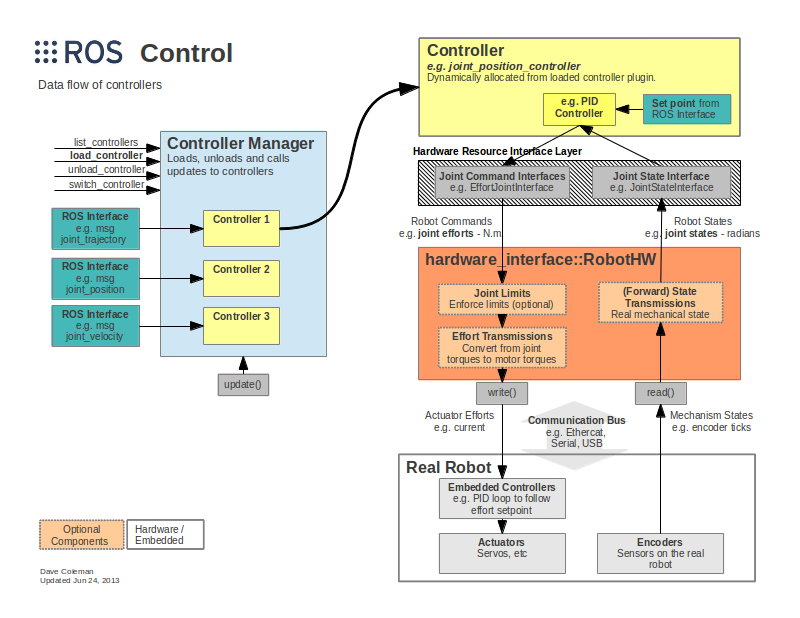
ROS Control combines a set of packages that include controller interfaces, controller managers, transmissions and hardware_interfaces.
ROS Control combines a set of packages that include controller interfaces, controller managers, transmissions and hardware_interfaces.
Occupancy Grid Map algorithm to map an environment.
For Simultaneous Localization and Mapping a lot of algorithms exist. This post shows the basics of SLAM and how Grid-based FastSLAM works using ROS.
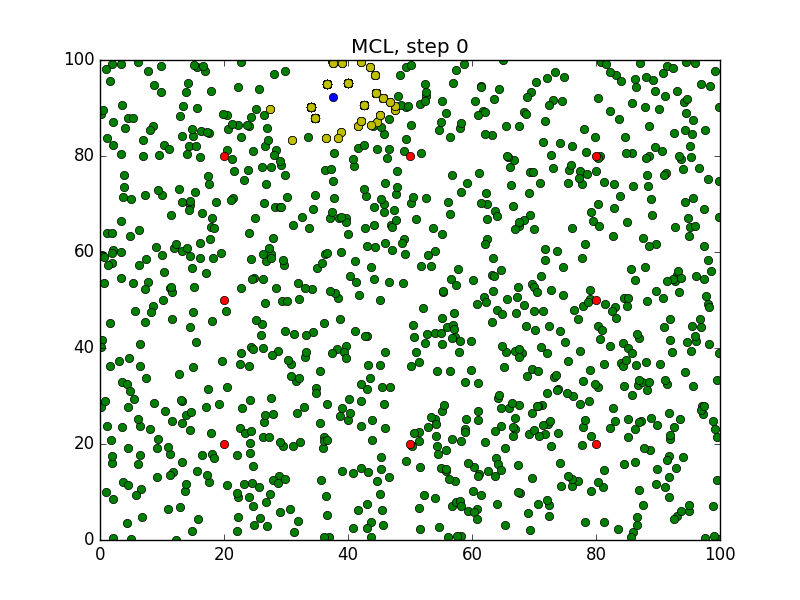
Monte Carlo Localization Algorithm and C++ Implementation
The Kalman filter is used for state estimation and sensor fusion. This post shows how sensor fusion is done using the Kalman filter and ROS.